| Rozdzielczość 14-bitowa i 16-bitowa |  |
| Dokładność 4′ i 2′ | |
| Moc wyjściowa 2VA | |
| Błąd wektora małego promienia (0,03%) | |
| Wyposażony w ochronę przeciwprzepięciową i przeciwzwarciową | |
| Wyposażony w pin wyjściowy telemetryczny | |
| Bez konieczności zewnętrznej regulacji | |
| Kompatybilność pin-to-pin z produktem DRC1745/1746 firmy AD |
Synchronizator/Resolwer napędu; system antenowy; system serwo; zintegrowany
symulator.
3. Opis konwerterów cyfrowo-synchronizacyjnych serii HDRC14-16 lub konwerterów cyfrowo-rezolwerowych
Produkty serii HDRC14/HDRC16 to konwertery cyfrowe do przeliczników lub
przetworniki cyfrowo-synchro o hybrydowej strukturze układu scalonego,
obciążenie może być obciążeniem indukcyjnym, pojemnościowym lub rezystancyjnym i jest to | |
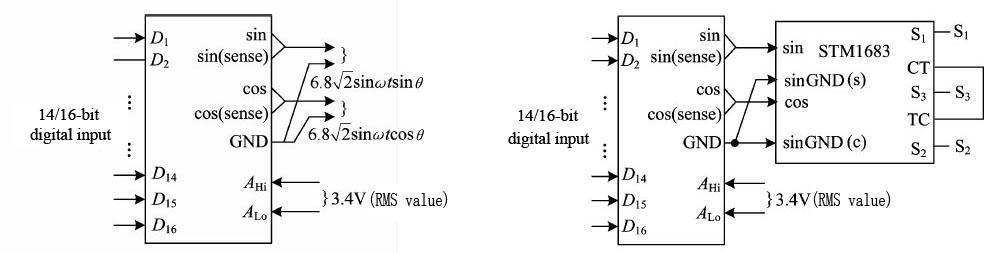
wyposażone w zabezpieczenie nadprądowe i przepięciowe. Wyjście | konwerter może bezpośrednio sterować resolwerem, a także może sterować transformator sterujący synchronizacją poprzez podłączenie zewnętrznego transformatora. Unikalna wydajność produktów serii HDRC14/HDRC16 jest sinusoidalna i |
cosinusowe wyjście telemetryczne. W ten sposób, wykonując jazdę po długich liniach, może:zapewniają precyzję konwertowanego sygnału wyjściowego. | Produkty z serii HDRC14/HDRC16 są wyposażone w wewnętrzny zatrzask, który jest sterowane przez high bit enable end HBE i low bit enable end LBE i można go wygodnie połączyć z magistralą danych. Produkty z serii HDRC14/HDRC16 to podwójne, 40-pinowe, metalowe obudowy w linii. |
4. Parametry elektryczne (tabela 1, tabela 2) przetworników cyfrowo-synchronizacyjnych serii HDRC14-16 lub przetworników cyfrowo-rozdzielczych | ||||||
Tabela 1 Warunki znamionowe i zalecane warunki pracy | Maks. bezwzględna Wartość znamionowa | Napięcie zasilania Vs: ± 7,25 V | Napięcie logiczne VL: +5,5V | Zakres temperatury przechowywania: -65 ℃ ~ + 150 ℃ | ||
Zalecane działanie | warunki | Napięcie zasilania Vs: ± 5V | Napięcie logiczne VL: +5V | |||
Częstotliwość odniesienia f: 400Hz~2000Hz | - | 14 | - | 16 | Zakres temperatury pracy TA: -55℃~125℃ | |
Tabela 2 „Charakterystyka elektryczna” | - | Charakterystyka | - | ±2 | HDRC14 | |
HDRC16 | Jednostka | Uwagi | Min. | Maks. | V | |
Min. | Maks. | Rezolucja | fragment | Błąd kąta | V | |
±5,3 Minuta kątowa | Analogowe wejście odniesienia | 3,23 | 3,57 | 3,23 | V | |
3,57 | - | 25 | - | 25 | Wyjście sygnału resolwera | |
6,46 | 0 | 7.14 | 0 | 6,46 | 7.14 | |
Osiągać | (VRef-Vo) | - | 1.999 | - | kΩ | |
2.001 | - | 1.999 | - | 2.001 | Ω | |
Współczynnik temperaturowy wzmocnienia wyjściowego | - | 2 | - | 2 | VA | |
PPM/℃ | - | Zakres częstotliwości wejścia analogowego | - | 2,6 | - | |
2,6 | kHz | Impedancja wejścia analogowego | - | |||










 (2) Zasilanie pulsacyjne
(2) Zasilanie pulsacyjne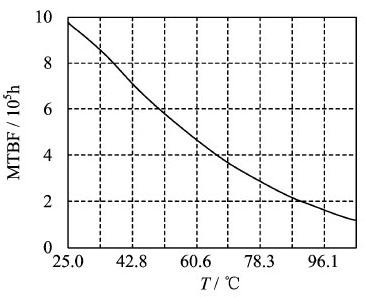

Z u003d obciążenie wyjściowe | (3)Przykład zużycia energii | Istnieje wiele czynników, które wpływają na zużycie energii, | następujące cztery przykłady używają typowych obciążeń i najgorszego kąta cyfrowego | stan (45º). Te przykłady mogą zilustrować, że przy użyciu pulsującej mocy | może zmniejszyć zużycie energii. | Tutaj warunki pracy to: | VDCu003d±15V; Vpu003d3V; Vout u003d 9,6 V (wartość skuteczna wynosi 6,8 V); VACu003d9.6V (około | równy Vout); I1u003d292mA (odpowiednik obciążenia wymagającego 1,4VA). |
1 | ① Zasilanie DC, θu003d45º, obciążenie rezystancyjne | ② Tak jak w przykładzie 1, zasilanie jest pulsującym napięciem 3V. | 13 | Przy zastosowaniu mocy pulsującej, wewnętrzny pobór mocy zmniejsza się o 1,75W, ich stosunek wynosi 3,2:1. | ③ Zasilanie DC, θu003d45º, czysto indukcyjne obciążenie | 28 | ④ Tak jak w przykładzie 3, zasilanie jest pulsującym napięciem 3V. | (4)Załaduj |
2 | D2 | Następnie zilustrujemy, jak obliczyć obciążenie. Dla kontroli | 14 | transformator synchroniczny, najpierw należy uzyskać wartość Zso, | co jest zazwyczaj dostarczane przez producenta synchro. Kontrola | 29 | V- | obciążenie to: |
3 | D3 | Gdzie V2 jest wartością skuteczną napięcia sygnału. | 15 | Jeśli transformator wyjściowy zostanie dodany na styku wyjściowym, do obliczonej mocy należy dodać 0,25 VA. | Na przykład załóżmy, że wartość RMS sygnału wynosi 90V, 400Hz, użyj | 30 | V+ | Zewnętrzny transformator wyjściowy HRDC14 do sterowania transformatorem sterującym |
4 | D4 | synchron. Zastosowanie zewnętrznego transformatora ma na celu zwiększenie wartości skutecznej | 16 | wyjście napięciowe HRDC14 od 6,8 V do 90 V wymagane przez sterowanie | transformator. | 31 | Dla transformatora sterującego synchro Zso to 700+j4900. | Dlatego obciążenie przy stosowaniu transformatora sterującego wynosi: |
5 | D5 | ; następnie plus dodatkowy pobór mocy transformatora, całkowity pobór mocy wynosi 1,48 VA. | Ta metoda może być również stosowana w przypadku aplikacji wykorzystującej obrotowe | NC | transformator sterujący, ale nie trzeba go mnożyć przez 3/4. | 32 | LE | 6. Krzywa MTBF (rys. 3) przetworników cyfrowo-synchro lub przetworników cyfrowo-rozdzielczych serii HDRC14-16 |
6 | D6 | Ryc. 3 Krzywa MTBF-temperatura | 21 | (Uwaga: zgodnie z GJB/Z299B-98, przewidywany dobry stan gruntu) | 7. Oznaczenie styków (rys.4, Tabela 3) przetworników cyfrowo-synchronizacyjnych serii HDRC14-16 lub przetworników cyfrowo-rezolwerowych | 33 | HE | Ryc. 4 Schemat ideowy szpilki (widok z dołu) |
7 | D7 | Tabela 3 „Opis funkcjonalny pinów” | 22 | Szpilka | Symbol | 34 | Funkcjonować | Szpilka |
8 | D8 | Symbol | 23 | Funkcjonować | Szpilka | 35 | Symbol | Funkcjonować |
9 | D9 | D1(MSB) | 24 | 1-bitowe wejście cyfrowe | D13 | 36 | 13-bitowe wejście cyfrowe | GND |
10 | Uziemienie analogowe | 2-bitowe wejście cyfrowe | 25 | D14(LSB) | 14-bitowe wejście cyfrowe | -15 V zasilanie | NC | 3-bitowe wejście cyfrowe |
11 | D15 | 15-bitowe wejście cyfrowe | 26 | Zasilanie +15 V | 4-bitowe wejście cyfrowe | |||
12 | D16(LSB) | 16-bitowe wejście cyfrowe | 27 | V1+ | Zasilanie +5 V |
Koniec wyjścia cosinus | Włączono wysoki 8-bitowy wybór | 7-bitowe wejście cyfrowe | Vsin | Koniec wyjścia sinusoidalnego | RLo | |
1 | Dolny koniec wejścia odniesienia | 7 | 8-bitowe wejście cyfrowe | 13 | V+P | |
2 | Zasilanie pulsacyjne +15V | 8 | RHi | Wejście wysokiego końca odniesienia | 9-bitowe wejście cyfrowe | |
3 | V-P | 9 | -15V pulsująca moc | 15 | Sprawa | |
4 | Sprawa uziemienia | 10 | D10 | 10-bitowe wejście cyfrowe | bo telemetria | |
5 | Cosinusowy koniec telemetryczny | 11 | 37-40 | |||
6 | Brak połączenia | 12 | D11 |
telemetria grzechu | Koniec telemetrii sinusoidalnej |
 | |

wymagane, wówczas „HBE” i „LBE” mogą być w obwodzie otwartym. | Wszystkie piny wejścia cyfrowego mają wewnątrz rezystancję 27 kΩ, aby być | podłączony z zasilaczem 5V, a więc jeśli prąd 50μA na dowolnym wejściu zatrzaskowym | pin wycieka do zewnętrznego dysku cyfrowego, nadal może zapewnić wszystkie dane wejściowe | piny kompatybilne z poziomem TTL są stabilne. | 8. Tabela wartości wag (Tabela 4) przetworników cyfrowo-synchronizacyjnych serii HDRC14-16 lub przetworników cyfrowo-rozdzielczych | Tabela 4 „Tabela wartości mas” | Bit/(MSB) | Kąt |
Bit/(MSB) | Kąt | Bit/(MSB) | Kąt | 180.000 0 | 2.812 5 | 0,043 9 | 90 000 0 |


Subscribe to our weekly newsletter and receive exclusive offers on products you love!
 X
X




















 Gold Supplier
Gold Supplier