Szczegóły produktu
Synchro/Resolver-Cyfrowy Konwerter
(Seria HSDC/HRDC174)
1. Charakterystyka produktu (patrz Rys. 1 dla widoku z zewnątrz i Tabela 1 dla modeli)
Konwersja wewnętrznej izolacji różnicowej
Rozdzielczość: 12 bitów, 14 bitów
Wyjście zatrzasku trójstanowego
Wysoka prędkość ciągłego śledzenia
32-przewodowy pakiet metalowej obudowy mgły solnej
Montaż o wysokiej gęstości MCM
Pojemność antystatyczna 2000V
Pin-to-pin kompatybilny z produktem SDC/RDCl740/1741/1742 firmy AD
Rozmiar: 44,2 × 28,9 × 7,2 mm3; waga: 22g
Rys. 1 Widok zewnętrzny serii HSDC/HRDC174
2. Zakres zastosowania
system przyrządów pokładowych;
System kontroli artylerii;
System sterowania awioniki;
Radarowy system kontroli;
System nawigacji statku;
System monitorowania anteny;
System robota;
Tokarka CNC;
Inne różne automatyczne systemy sterowania Tabela 1 modele produktów
12-bitowy 14-bitowy
Synchro Rozpoznawanie Synchro Rozpoznawanie
HSDCl742-X11 HRDCl742-X13 HSDCl744-X11 HRDCl744-X13
HSDCl742-X12 HRDCl742-X14 HSDCl744-X12 HRDCl744-X14
HSDCl742-X41 HRDCl742-X18 HSDCl744-X41 HRDCl744-X18
HSDCl742-X42 HRDCl742-X23 HSDCl744-X42 HRDCl744-X23
HSDCl742-X21 HRDCl742-X24 HSDCl744-X21 HRDCl744-X24
HSDCl742-X22 HRDCl742-X28 HSDCl744-X22 HRDCl744-X28
HRDCl742-X43 HRDCl744-X43
HRDCl742-X44 HRDCl744-X44
HRDCl742-X48 HRDCl744-X48
3. Zarys
Produkty serii HSDC/HDC174 to hybrydowo zintegrowany 12-bitowy lub 14-bitowy synchronizator/resolwer z ciągłym śledzeniem na konwerter cyfrowy zaprojektowany zgodnie z zasadą serwo typu II. Produkty tej serii przyjmują proces MCM, podstawowe elementy przyjmują specjalne chipy opracowane niezależnie przez nasz instytut. Produkt wykorzystuje 32-przewodową metalową obudowę DIL z płytką wnęką, odporną na mgłę solną, o małej objętości i niewielkiej wadze, a także kompatybilne pin-to-pin z produktami SDC/RDC1740/1741/1742 firmy AD, USA.
Projekt i produkcja HSDC/HRDCl74 spełniają wymagania GJB 2438A-2002 „Ogólna specyfikacja hybrydowych układów scalonych” oraz specyfikacja produktu z klasą zapewnienia jakości H. 4. Parametry techniczne (tabela 2, tabela 3)
Tabela 2 Warunki znamionowe i zalecane warunki eksploatacji
Maks. bezwzględna wartość oceny Napięcie zasilania Vs: ±17,25VDC
Logiczne napięcie zasilania VL: +7V
Zakres temperatury przechowywania: -65 ℃ ~ + 150 ℃
Zalecane warunki pracy Napięcie zasilania Vs: ±15±0,75V
Napięcie zasilania 5 V: 5 ± 0,25 V
Efektywna wartość napięcia odniesienia VRef: 115V, 26V, 11,8V
Efektywna wartość napięcia sygnału V1: 90V, 26V, 11,8V
Częstotliwość odniesienia f*: 400Hz, 50Hz, 2,6kHz
Zakres temperatury pracy TA: -55℃~125℃
Uwaga: * oznacza, że można go dostosować zgodnie z wymaganiami użytkownika.
Tabela 3 Charakterystyki elektryczne (-55~+125℃)
Charakterystyka Seria HSDC/HRDC1740 Seria HSDC/HRDC1744 Jednostka Uwagi
Dokładność ±8,5 (maks.) ±5,3 (maks.) Minuta kątowa
Prędkość śledzenia 36 (typowo) 27 (typowy) r/s
Rezolucja 12 14 Fragment
Częstotliwość sygnału i odniesienia 50~2600 50~2600 Hz
Napięcie wejściowe sygnału 2~90 2~90 V
Referencyjne napięcie wejściowe 2~115 2~115 V
Impedancja wejściowa sygnału 90V Pojedynczy koniec 100 100 kΩ
Sygnał Mechanizm różnicowy 200 200 kΩ
26V Pojedynczy koniec 28 28 kΩ
Sygnał Mechanizm różnicowy 56 56 kΩ
11.8V Pojedynczy koniec 13 13 kΩ
Sygnał Mechanizm różnicowy 26 26 kΩ
Referencyjna impedancja wejściowa 115V Pojedynczy koniec 127 127 kΩ
Odniesienie Mechanizm różnicowy 254 254 kΩ
26V Pojedynczy koniec 28 28 kΩ
Odniesienie Mechanizm różnicowy 56 56 kΩ
90V Pojedynczy koniec 100 100 kΩ
Odniesienie Mechanizm różnicowy 200 200 kΩ
Stała przyspieszenia 80000 (min.) 56000 (min.) s2 Gwarancja projektu
Odpowiedź kroku 75 (maks.) 100 (maks.) ms
Prąd zasilania +VS +15V 35 (maks.) 35 (maks.) mA
-VS +15V 35 (maks.) 35 (maks.) mA
VL +5V 56 (maks.) 56 (maks.) mA
Pobór energii 1,4 (maks.) 1,4 (maks.) W
Czas rozliczenia lub zwolnienia 80 (maks.) 80 (maks.) ns
Czas rozliczenia 640 (maks.) 640 (maks.) ns
Szerokość impulsu zajętego 200~600 (typowo 400) 200~600 (typowo 400) ns
Ładowność 2 min.) 2 min.) TTL
Wyjście cyfrowe VOH 3,3 (min.) 3,3 (min.) VDC
TOM 0,7 (maks.) 0,7 (maks.) VDC
Ładowność 3 (maks.) 3 (maks.) TTL
Wybór zakresu temperatury pracy 8YZ -55~+125 -55~+125 ℃
5. Zasada działania (rys. 2 i rys. 3)
Sygnał wejściowy synchronizacji (lub przelicznika) jest przekształcany na sygnał ortogonalny poprzez wewnętrzną izolację różnicową:
Vsinu003dKE0sin(ωt+α) sinθ (sin)
Vcosu003dKE0sin(ωt+α) cosθ (cos)
Gdzie θ jest kątem wejścia analogowego.
Te dwa sygnały i kąt cyfrowy φ wewnętrznego licznika rewersyjnego są mnożone w mnożniku funkcji sinus i cosinus, a sygnał błędu otrzymuje się po przetworzeniu:
KE0sin(ωt+α) (sinθ cosφ -cosθ sinφ)
czyli KE0sin(ωt+α) sin(θ-φ)
Sygnał ten jest przesyłany do oscylatora sterowanego napięciem po wzmocnieniu, dyskryminacji fazy, filtracji integracyjnej. Jeśli θ-φ≠0, oscylator sterowany napięciem będzie wysyłał impulsy, a licznik odwracalny zlicza je do momentu, gdy θ-φu003d0. W tym procesie konwerter cały czas śledzi zmianę kąta wejściowego.
Rys.2 Schemat blokowy zasady działania
Rys. 3 Diagram sekwencji czasowej dla transferu magistrali
wejście logiczne tylko blokuje transfer danych z licznika odwracalnego do zatrzasku wyjścia bez przerywania działania pętli śledzącej. Po zwolnieniu systemu Inhibit automatycznie zostanie wygenerowany impuls, który jest używany do aktualizacji danych wyjściowych.
input określa stan danych wyjściowych. Podczas gdy Logic Hi sprawia, że koniec wyjścia pojawia się w stanie wysokiej impedancji; Logic Low przesyła dane w zatrzasku do pinów wyjściowych. uruchamia prawidłowe dane 8-bitowe o wyższej wartości, a prawidłowe dane 6-bitowe o niższej wartości (HSDC/HRDC1742 jest typu 4-bitowego).
Zajęty
Gdy zmienia się wejście konwertera, Busy wyprowadza ciąg impulsów o poziomie CMOS, którego częstotliwość jest określana przez najwyższą prędkość obrotową. Opadające zbocze impulsów Busy wyzwala zatrzask aktualizacji danych, a dane wyjściowe są ważne po max. 600ns opóźnienia. Typowa szerokość impulsów Busy wynosi 400ns. Obciążalność wyjścia wynosi 3TTL.
(1) Metody i kolejność czasowa przesyłania danych
Dostępne są dwie metody przesyłania danych:
① tryb
Po 640 s niskiego stanu logicznego dane wyjściowe są prawidłowe, a konwerter realizuje transfer danych przez i . Po zwolnieniu Inhibit system automatycznie wygeneruje impuls o szerokości równej szerokości impulsu Busy do aktualizacji danych.
② Tryb biustu:
Na zboczu narastającym impulsu Busy liczy się trójstanowy licznik odwracalny; na zboczu opadającym impulsu Busy generuje wewnętrznie impuls zatrzasku o szerokości równej szerokości impulsu Busy do aktualizacji danych zatrzasku trójstanowego, kolejność przesyłania danych jest pokazana na rys. 3, innymi słowy , po 600ns niskiego poziomu logiki zajętości, stabilny transfer danych jest prawidłowy. W trybie odczytu asynchronicznego wyjście Busy jest ciągiem impulsów poziomu CMOS, szerokości jego wysokiego i niskiego poziomu zależą od częstotliwości roboczej i prędkości obrotowej wybranego urządzenia.
(2) Kompatybilność
Gdy produkty serii HSDC/HRDC174 są używane w warunkach nienominalnych sygnałów i nienominalnego napięcia odniesienia, proporcjonalne rezystancje są połączone szeregowo na końcu sygnału i na końcu wejścia wzbudzenia w celu zapewnienia kompatybilności.
Przykład 1: Podłączenie HSDC1742-441 dla napięcia wzbudzenia/napięcia sygnału/częstotliwości 36V/26V/400Hz pokazano na rys. 4:
Przykład 2: Podłączenie HRDC1742-418 dla napięcia wzbudzenia/napięcia sygnału/częstotliwości 36V/26V/400Hz pokazano na rys. 5:
Rys. 4 Podłączenie HSDC1742-411
Rys. 5 Podłączenie HSDC1742-418 R1u003d(V1 - V1 wartość nominalna)×1,11 k
u003d(26 V – 11,8 V)×1,11 k
u003d 15,8 kΩ
R2u003d(VRef - VRef wartość nominalna)×1,11 k
u003d(36 - 26)×1,11 k
u003d 11,1 kΩ
R3u003d(V1 - V1 wartość nominalna)×1,11 k
u003d(26 V – 11,8 V)×1,11 k
u003d 15,8 kΩ
R4u003d(VRef - VRef wartość nominalna)×1,11 k
u003d(36 - 26)×1,11 k
u003d 11,1 kΩ
(3) Dynamiczne zachowanie
Funkcję przenoszenia konwertera przedstawia rys. 6:
Wzmocnienie w pętli zamkniętej:
Wzmocnienie w pętli zamkniętej:
θin + θout
Rys. 6 Funkcja transferu
Model: HSDC/HRDC1742
Tutaj Kau003d80000, T1u003d0,0087, T2u003d0,01569
(4) Błąd przyspieszenia
Konwerter został zaprojektowany z wykorzystaniem zasady śledzenia pętli serwo typu II, więc teoretycznie nie ma błędu opóźnienia prędkości, ale ma błąd przyspieszenia. Ten błąd można zdefiniować w następujący sposób za pomocą stałej przyspieszenia K konwertera:
Kau003d
Poniżej znajduje się przykład obliczania błędu śledzenia 14-bitowego konwertera HSDC1744 przy użyciu stałej przyspieszenia Ka:
Kau003d56000, przyspieszenie 50 obr/s2
Błąd najmniej znaczącego bitu u003d u003d 14.62LSBs
6. Typowe krzywe charakterystyczne (rys. 7 i rys. 8)
Częstotliwość/Hz
Rys. 7 Wykres wzmocnienia HSDC/HRDC1742
Częstotliwość/Hz
Rys. 8 Wykres wzmocnienia HSDC/HRDC1742
7. Krzywa MTBF (rys. 9)
Temperatura/℃
Rys. 9 Krzywa MTBF-temperatura 8. Oznaczenie pinów (rys. 10, tabela 4)
Rys. 10 Kołki (widok od dołu)
(Uwaga: zgodnie z GJB/Z299B-98, przewidywany dobry stan gruntu)
Tabela 4 Oznaczenia pinów
Szpilka Symbol Funkcjonować Szpilka Symbol Funkcjonować
1 D1 Wyjście cyfrowe 1 (MSB) 17② NC/S4 Brak połączenia/wejście resolwera S4
2 D2 Wyjście cyfrowe 2 18 S3 Wejście resolwera/synchro S3
3 D3 Wyjście cyfrowe 3 19 S2 Wejście resolwera/synchro S2
4 D4 Wyjście cyfrowe 4 20 S1 Wejście resolwera/synchro S1
5 D5 Wyjście cyfrowe 5 21 NC Brak połączenia
6 D6 Wyjście cyfrowe 6 22 NC Brak połączenia
7 D7 Wyjście cyfrowe 7 23 Sprawa Sprawa
8 D8 Wyjście cyfrowe 8 24④ NC或(Wel)* Brak połączenia (lub wyjścia prędkości)
9 D9 Wyjście cyfrowe 9 25③ Włącz niski 4-bit/6-bit
10 D10 Wyjście cyfrowe 10 26 Włącz wysoki 8-bitowy
11 D11 Wyjście cyfrowe 11 27 Zajęty Sygnał „Zajęty”
12 D12 Wyjście cyfrowe 12 28 Hamować
13 NC/D13 Brak połączenia/wyjście cyfrowe 13 29 +VS +15V moc
14 NC/D14 Brak połączenia/wyjście cyfrowe 14 30 GND Grunt
15 RLo Dolny koniec wejścia sygnału odniesienia 31 -VS -15V moc
16 RHi Wysoki koniec wejścia sygnału odniesienia 32 VLo +5V moc
Uwagi: ① W konwerterach serii HSDC1742 i HRDC1742 piny 13 i 14 nie są podłączone;
② W przypadku HSDC174X pin 17 nie jest podłączony; dla HRDC174X, pin 17 jest końcówką wejścia resolwera S4;
③ W przypadku konwerterów serii HSDC1742 i HRDC1742, styk 25 służy do włączania sterowania 4-bitowego w trybie low;
④ Gdy istnieje wymóg prędkości, jest wyprowadzany z pinu 24.
9. Tabela wartości mas (Tabela 5)
Tabela 5 Tabela wartości masy
Fragment Kąt Fragment Kąt Fragment Kąt
1 180,0000 6 5.6250 11 0,1758
2 90,0000 7 2,8125 12 (dla 12-bitowego LSB) 0,0879
3 45.0000 8 1.4063 13 0,0439
4 22.5000 9 0,7031 14 (dla 14-bitowego LSB) 0,0220
5 11.2500 10 0,3516
10. Schemat połączeń dla typowego zastosowania (rys. 11)
Uwagi:
(1) Napięcie na styku 29 i styku 31 powinno wynosić ±15 V i nie powinno być połączone odwrotnie. Zasilanie logiki cyfrowej +5V jest podłączone do pinu 32.
(2) Pomiędzy zasilaczem a uziemieniem kondensator ceramiczny 0,1 µF i kondensator elektrolityczny 6,8 µF powinny być połączone równolegle.
(3) Pin oznaczony Case został podłączony do obudowy.
(4) Wyjścia cyfrowe HSDC/HRDC1742 to styki 1 do 12, styki 13 i 14 nie są połączone.
Rys. 11 Schemat połączeń dla typowego zastosowania
(5) Odniesienie jest podłączone do RLo na pinie 15 i RHi na pinie 16. W przypadku synchronizacji sygnały są podłączone do S1, S2 i S3 zgodnie z następującą konwencją:
sin(ωt+α) sinθ
sin(ωt+α) sin(θ+120o)
sin(ωt+α) sin(θ+240o)
W przypadku resolwera sygnały są podłączone do S1, S2, S3 i S4 zgodnie z następującą konwencją:
sin(ωt+α) sinθ
sin(ωt+α) cosθ
(6) W przypadku przelicznika styk 17 to S4, a w przypadku synchronizacji styk 17 nie jest podłączony.
11. Specyfikacja opakowania (jednostka: mm) (rys. 12, tabela 6 i 7)
Rys.8 Widok opakowania z zewnątrz Tabela 6 Symbole i wartości nominalne
Symbol Wartość nominalna
A 7,2
Φb 0,45
D 44,2
E 28,9
e 2,54
e1 22,86
L 5 minut
Tabela 7 Materiały obudowy
Model obudowy nagłówek Poszycie nagłówka Pokrywa Poszycie pokrywy Materiał przypinki Pin poszycia Styl uszczelniania Uwagi
UP4429-32a Kowar (4J29) Ni Stop Fe-Ni (4J42) Ni Kowar (4J29) Ni/Au Dopasowane opakowanie Powłoka kołka 23 to Ni
Uwaga: temperatura pinów lutowniczych nie powinna przekroczyć 300℃ w ciągu 10s.
12. Klucz numeracji części (rys. 13)
Rys. 13 Klawisz numeracji części
Uwaga: gdy powyższe napięcie sygnału i napięcie odniesienia (Z) są niestandardowe, należy je podać w następujący sposób:
(np. napięcie odniesienia 5V i napięcie sygnału 3V są wyrażone jako -5/3)
Środki ostrożności dotyczące stosowania
Napięcie zasilania musi być utrzymywane zgodnie z napięciem o prawidłowej polaryzacji.
Kiedy max. przekroczona zostanie bezwzględna wartość znamionowa, urządzenie może ulec uszkodzeniu.
Podczas montażu spód produktu powinien ściśle przylegać do płytki drukowanej, aby uniknąć uszkodzenia styków, aw razie potrzeby należy dodać zabezpieczenie przed wstrząsami.
Nie zginaj wyprowadzeń, w przeciwnym razie spowoduje to pęknięcie izolatora, co ma wpływ na właściwości uszczelniające.
Gdy użytkownik składa zamówienie na produkt, szczegółowe wskaźniki wydajności elektrycznej odnoszą się do odpowiedniej normy przedsiębiorstwa.
Synchro/Resolver-Cyfrowy Konwerter
(Seria HSDC/HRDC1746)
1. Cechy (patrz Rys. 1 dla widoku z zewnątrz i Tabela 1 dla modeli)
Konwersja wewnętrznej izolacji różnicowej
Rozdzielczość: 16 bitów
Wyjście zatrzasku trójstanowego
Nieprzerwane śledzenie podczas przesyłania danych
32-przewodowy pakiet metalowej obudowy
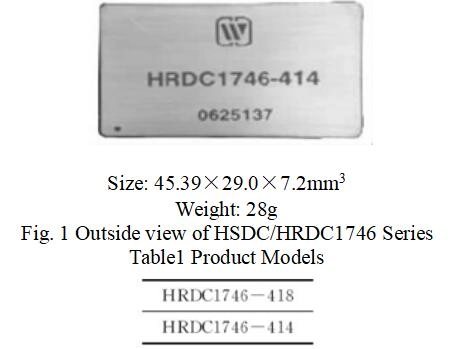
Rozmiar: 45,39×29,0×7,2mm2; Waga: 28g
Rys. 1 Widok zewnętrzny HSDC (serii HRDC1746) Tabela 1 Modele produktów
HRDC1746 418
HRDC1746 414
2. Zakres zastosowania
system przyrządów pokładowych; wojskowy system sterowania serwomechanizmem; system kontroli dział; lotniczy system elektroniczny; system kontroli radarowej; system nawigacji okrętów wojennych; monitorowanie anteny; technologia robotów, obrabiarki sterowane numerycznie (CNC); i inny system sterowania automatyką.
3. Zarys
Seria HSDC/HRDC1746 synchro/resolver-cyfrowy konwerter został zaprojektowany zgodnie z zasadą śledzenia serwomechanizmu typu II i przyjmuje wejście izolacji różnicowej, wyjście danych przyjmuje trójstanowy tryb zatrzaskowy, nadaje się do konwersji sygnału analogowego/sygnału cyfrowego trzech -wire synchro i czteroprzewodowy resolwer. Dzięki dużej szybkości konwersji oraz stabilnej i niezawodnej wydajności urządzenie to może być szeroko stosowane w pomiarach kątów i automatycznych systemach sterowania.
Ten produkt jest wytwarzany w grubowarstwowym hybrydowym procesie integracji i jest całkowicie uszczelnionym metalowym opakowaniem 32-przewodowym DIP. Projektowanie i wytwarzanie produktów powinno spełniać wymagania GJB2438A-2002 „Ogólna specyfikacja hybrydowego układu scalonego” oraz szczegółowe specyfikacje produktów.
4. Parametry techniczne (tabela 2, tabela 3)
Tabela 2 Warunki znamionowe i zalecane warunki eksploatacji
Maks. bezwzględna wartość oceny Napięcie zasilania Vs: ±17,25 VOC
Napięcie logiczne VL: +7V
Zakres temperatury przechowywania: -55 ~ + 150 ℃
Zalecane warunki pracy Napięcie zasilania Vs: ±15±5%
Efektywna wartość napięcia odniesienia VRef: ±10% wartości nominalnej
Efektywna wartość napięcia sygnału Vi: ±5% wartości nominalnej
Częstotliwość sygnału odniesienia f*: ±10% wartości nominalnej
Przesunięcie fazowe między sygnałem a wzbudzeniem: <±10%
Zakres temperatury pracy TA: 40~+105 ℃
Tabela 3 Charakterystyki elektryczne
Charakterystyka Seria HSDC/HRDC1746 Uwagi
Min. Maks.
Dokładność/minuta kątowa 2,6 2,6
Prędkość śledzenia: rps 3 3
Rozdzielczość/bit 16
Częstotliwość sygnału i odniesienia/Hz 50 2,6 tys
Napięcie sygnału (wartość skuteczna)/V 2 90
Napięcie odniesienia (wartość skuteczna)/V 2 115
Uwaga: * oznacza, że można go dostosować zgodnie z wymaganiami użytkownika.
5. Zasada działania
Synchroniczny sygnał wejściowy (lub sygnał wejściowy przelicznika) jest konwertowany na sygnał ortogonalny poprzez wewnętrzną izolację różnicową:
V1-KE0sinθ sinωt
V2-KE0cosθ sinωt
Gdzie θ jest symulowanym kątem wejściowym.
Sygnał ortogonalny jest mnożony przez binarny kąt cyfrowy φ w wewnętrznym liczniku odwracalnym w mnożniku funkcji sinus-cosinus i otrzymuje się funkcję błędu:
WT0sinθ cosφ sinωt-W0cosθ sinφ sinωtu003dW0sin(θ-φ) sinωt
Poprzez wzmocnienie błędu, dyskryminację fazową i filtrację tej funkcji błędu uzyskuje się sin(θ-φ), gdy θ-φu003d0 (w granicach dokładności przekształtnika), błąd ten spowoduje zmianę impulsu korekcji na wyjściu oscylatora sterowanego napięciem binarny kąt cyfrowy φ licznika rewersyjnego tak, aby wartość wyjściowa φ była równa wartości wejściowej z dokładnością przekształtnika, układ staje się stabilny i może śledzić zmianę kąta wejściowego φ. W ten sposób na liczniku rewersyjnym uzyskuje się binarny kąt cyfrowy φ reprezentujący kąt wału wejściowego θ (rys. 2).
Rys. 2 Schemat blokowy obwodu
(1) Charakterystyka dynamiczna
Funkcja przenoszenia konwertera jest pokazana na rys. 3:
Wzmocnienie w pętli otwartej:
Funkcja zamkniętej pętli:
Dla modułu tego modelu Kau003d48000/S2, T1u003d7,1ms, T2u003d1,25ms
Rys. 3 Przekazywanie funkcji konwertera
(2) Metody przesyłania danych i sekwencja czasowa
Kontrola wyboru chipa
Ten pin jest pinem wejściowym logiki sterującej, jego funkcją jest wysyłanie danych do konwertera w celu realizacji sterowania trójstanowego. Niski poziom jest prawidłowy, dane wyjściowe konwertera zajmują magistralę danych. Gdy jest na wysokim poziomie, wyprowadzenie danych konwertera jest w trzech stanach, urządzenie nie zajmuje magistrali.
Wybór bajtów
Pin ten jest pinem wejściowym logiki sterującej, jego funkcją jest zewnętrzne wykonanie kontroli wyboru na danych wyjściowych konwertera w trybie transmisji 8-bitowej lub 16-bitowej magistrali danych. Gdy wymagany jest tryb transmisji 16-bitowej magistrali danych, utrzymuj ten pin logiczny w stanie wysokim, dane będą przesyłane w magistrali, wyjście bajtu wyższego znajduje się na stykach D1 do D8 (D1 to bit wysoki), a bajt niski jest w D9 do D16 . Gdy wymagany jest tryb transmisji 8-bitowej magistrali danych, dane są uzyskiwane na stykach D1 do D8 (w kolejności od wysokiego do niskiego), a wysokie 8 bitów i niskie 8 bitów są uzyskiwane przez dwie sekwencje czasowe, innymi słowy, gdy wybór bajtu ma stan logiczny wysoki, wyprowadzanych jest 8 bitów wysoki, a gdy jest niski, wyprowadzanych jest 8 bitów.
Kontrola blokady danych (sygnał wstrzymania)
Ten pin jest pinem wejściowym logiki sterującej, jego funkcją jest wysyłanie danych na zewnątrz do konwertera w celu realizacji opcjonalnego sterowania zatrzaskowego lub obejściowego. Na wysokim poziomie dane wyjściowe konwertera są bezpośrednio wyprowadzane bez zatrzasku, patrz diagram sekwencji czasowej przesyłania danych. Na niskim poziomie dane wyjściowe konwertera są zatrzaskiwane, pętla wewnętrzna nie jest przerywana, a śledzenie działa cały czas, ale licznik nie wysyła danych. Gdy zachodzi potrzeba przesłania danych, konwerter najpierw steruje sygnałem, aby zablokować dane od wysokiego do niskiego, utrzymuje stan logiczny w stanie niskim przez 640 ns, a następnie ustawia wejście na niski (w tym czasie urządzenie zajmuje szynę danych), a następnie uzyskuje dane przez Byte select, a następnie ustaw wszystkie logikę sterowania na wysoki, aby odświeżyć i zablokować dane, aby przygotować się do przesyłania następnych danych, zapoznaj się z diagramami sekwencji czasowej przesyłania danych Rys.4 i Rys.5.
(3) Metoda tłumienia sygnału wejściowego (rys.4 i rys.5)
Rys4 Sekwencja czasowa 16-bitowego transferu magistrali
Rys5 Sekwencja czasowa 8-bitowego transferu magistrali
6. Krzywa MTBF (rys. 6)
Rys.6 Krzywa MTBF-temperatura 7. Oznaczenie pinów (rys. 7, tabela 4)
Rys. 7 Kołki (widok od dołu)
(Uwaga: zgodnie z GJB/Z299B-98, przewidywany dobry stan podłoża)
Tabela 4 Oznaczenie pinów
Szpilka Symbol Oznaczający Szpilka Symbol Oznaczający
1 NC Brak połączenia 17 NC Pozostaw niepodłączony
2 D9 Wyjście dla bitu cyfrowego 9 18 RHi Wejście RHi resolwera
3 D10 Wyjście dla bitu cyfrowego 10 19 RLo Wejście RLo resolwera obrotowego
4 D11 Wyjście dla bitu cyfrowego 11 20 GND Grunt
5 D12 Wyjście dla bitu cyfrowego 12 21 -VS -15V moc
6 D13 Wyjście dla bitu cyfrowego 13 22 +VS +15V moc
7 D14 Wyjście dla bitu cyfrowego 14 23 Cyfrowa kontrola blokady
8 D15 Wyjście dla bitu cyfrowego 15 24 D1 Wyjście dla bitu cyfrowego 1
9 D16 Wyjście dla bitu cyfrowego 16 25 D2 Wyjście dla bitu cyfrowego 2
10 Wybór chipa Włącz kontrolę 26 D3 Wyjście dla bitu cyfrowego 3
11 Bysel Wybór bajtów 27 D4 Wyjście dla bitu cyfrowego 4
12 S4/NC① Wejście S4/brak połączenia 28 D5 Wyjście dla bitu cyfrowego 5
13① S3 Wejście S3 29 D6 Wyjście dla bitu cyfrowego 6
14① S2 Wejście S2 30 D7 Wyjście dla bitu cyfrowego 7
15 S1 Wejście S1 31 D8 Wyjście dla bitu cyfrowego 8
16 NC Brak połączenia 32 NC Brak połączenia
Uwaga: ① W przypadku urządzenia HSDC, S4 nie jest używany.
8. Tabela wartości mas (Tabela 5)
Tabela 5 Tabela wartości mas
Bit (MSB) Kąt Bit (MSB) Kąt Bit (MSB) Kąt Bit (MSB) Kąt
1 180,0000 5 11.2500 9 0,7031 13 0,0439
2 90,0000 6 5.6250 10 0,3516 14 0,0220
3 45.0000 7 2,8125 11 0,1758 15 0,0110
4 22.5000 8 1.4063 12 0,0879 16 0,0055
Podłączenie konwertera
±15V, +5V i GND należy podłączyć do odpowiednich pinów na konwerterze, należy zwrócić uwagę, że polaryzacja zasilania musi być prawidłowa, w przeciwnym razie konwerter może ulec uszkodzeniu. Zaleca się podłączenie pojemności obejścia 0,1 μF i 6,8 μF równolegle między każdym zaciskiem zasilania a masą.
Dozwolone jest podłączenie źródła sygnału i wzbudzenia do S1, S2, S3 i S4 oraz końca RHi i RLo z błędem 5%.
Sygnał wejściowy powinien być dopasowany do fazy źródła wzbudzenia tak, aby można je było prawidłowo połączyć z przetwornikiem, ich fazy są następujące:
RHi~RLo:VRsinωt
W przypadku synchronizacji wejścia sygnałowe to:
Dla S1~S3: sinθ sinωt
Dla S3~S2: sin(θ+120o) sinωt
Dla S2~S1: sin(θ+240o) sinωt
W przypadku resolwera wejścia sygnałowe to:
Dla S1~S3: sinθ sinωt
Dla S2~S4: cosθ sinωt
Uwaga: żaden sygnał wejściowy RHi, RLo, S1, S2, S3 i S4 nie może być podłączony do innych pinów w obawie przed uszkodzeniem urządzenia.
10. Specyfikacja opakowania (jednostka: mm) (rys. 8, tabela 6)
Rys.8 Widok opakowania z zewnątrz
Tabela 6 Materiały obudowy
Model obudowy nagłówek Poszycie nagłówka Pokrywa Poszycie pokrywy Materiał przypinki Pin poszycia Styl uszczelniania Uwagi
UP4429-32a Kowar (4J29) Ni Stop Fe-Ni (4J42) Ni Kowar (4J29) Ni/Au Dopasowane opakowanie
Uwaga: temperatura pinów lutowniczych nie powinna przekroczyć 300℃ w ciągu 10s.
11. Klucz numeracji części (rys. 9)
Rys. 9 Klawisz numeracji części
Uwaga: gdy powyższe napięcie sygnału i napięcie odniesienia (Z) są niestandardowe, należy je podać w następujący sposób:
(np. napięcie odniesienia 5V i napięcie sygnału 3V należy wyrazić jako -5/3)
Środki ostrożności dotyczące stosowania
Zasilanie prawidłowo, podczas uruchamiania, dokładnie podłącz dodatnie i ujemne bieguny mocy, aby uniknąć wypalenia.
Podczas montażu spód produktu powinien ściśle przylegać do płytki drukowanej, aby uniknąć uszkodzenia styków, aw razie potrzeby należy dodać zabezpieczenie przed wstrząsami.
Nie zginaj wyprowadzeń, aby zapobiec pęknięciu izolatora, co ma wpływ na właściwości uszczelniające.
Gdy użytkownik składa zamówienie na produkt, szczegółowe wskaźniki wydajności elektrycznej odnoszą się do odpowiedniej normy przedsiębiorstwa.
Konwerter synchronizacji/resolwera na cyfrowy
(Seria HSDC/HRDC211)
1. Cechy (patrz Rys. 1 dla widoku z zewnątrz i Tabela 1 dla modeli)
Częstotliwość wzbudzenia: 50Hz, 400Hz, 2,6kHz
Rozdzielczość: 10-bit, 12-bit, 14-bit
Wysoka szybkość śledzenia
Niestandardowe wejście jest regulowane przez rezystancję zewnętrzną lub regulowane na końcu wejścia produktu
Wyjście napięcia stałego wprost proporcjonalne do prędkości kątowej
Kompatybilny z serią SDC1700 amerykańskiej firmy AD
Rozmiar: 79,4 × 66,7 × 11,8 mm2
Waga: 108g
Rys. 1 Widok zewnętrzny serii HSDC/HRDC211 Tabela 1 Modele produktów
12-bitowy 14-bitowy
Synchro Rozpoznawanie Synchro Rozpoznawanie
HSDC2112-412 HRDC2112-418 HSDC2114-412 HRDC2114-418
HSDC2112-411 HRDC2112-414 HSDC2114-422 HRDC2114-414
HRDC 2112N HSDC2114-411 HRDC 2114N
2. Zakres zastosowania
System serwo; system antenowy; pomiar kąta; technologia symulacji; kontrola artylerii; sterowanie obrabiarkami przemysłowymi,
3. Zarys
Ta seria jest cyfrowym synchronizatorem/resolwerem do konwertera o modułowej strukturze z wbudowanym półprzewodnikowym konwerterem izolacji SCOTT, zaprojektowanym zgodnie z zasadą serwomechanizmu typu II i może realizować ciągłe śledzenie i konwersję.
Moc robocza wynosi ±15V i +5V DC. Istnieją dwa rodzaje sygnału wyjściowego: trzyliniowy sygnał synchronizujący i referencyjny (konwerter SDC) lub czteroliniowy przelicznik i sygnał odniesienia (konwerter RDC); wyjście przyjmuje równoległe kody cyfrowe systemu binarnego.
4. Parametry elektryczne (tabela 2, tabela 3)
Tabela 2 Warunki znamionowe i zalecane warunki eksploatacji
Maks. bezwzględna wartość oceny Napięcie zasilania Vs: ± 17,5 V
Logiczne napięcie zasilania: +7V
Zakres temperatury przechowywania: -65 ℃ ~ + 150 ℃
Zalecane warunki pracy Napięcie zasilania +Vs: ±15V
Napięcie zasilania logiki 5V VL: ±5V
Efektywna wartość napięcia odniesienia VRef: 11,8V, 26V, 115V
Efektywna wartość napięcia sygnału Vi: 11,8V, 26V, 90V
Częstotliwość odniesienia f*: 50Hz, 400Hz, 2,6kHz
Zakres temperatur pracy TA: 0~70℃, -40~+85℃
Uwaga: * oznacza, że można go dostosować zgodnie z wymaganiami użytkownika.
5. Zasada działania
Synchroniczny sygnał wejściowy (lub sygnał wejściowy przelicznika) jest konwertowany na sygnał ortogonalny poprzez wewnętrzną izolację różnicową:
V1-KE0sinθ sinωt,V2-KE0cosθ sinωt
Tabela 3 Charakterystyki elektryczne
Charakterystyka HRDC/HSDC2110 HRDS/HSDC2112 HRDC/HSDC2114 Jednostka Uwagi
±10% wahania sygnału i napięcia odniesienia
Dokładność ± 10% wahania częstotliwości roboczej ±22 ±8,5 ±5,3 Minuta kątowa
± 5% wahania zasilania
5 (50Hz) 5 (50Hz) 1,38 (50 Hz)
Prędkość śledzenia 36(400Hz) 36(400Hz) 12(400Hz) r/s
75(2,6kHz) 75(2,6kHz) 25 (2,6 kHz)
Rezolucja Binarny równoległy kod cyfrowy 10 12 14 fragment
Częstotliwość sygnału i odniesienia 50, 400, 2,6 tys Hz Opcjonalny
Efektywna wartość referencyjnego napięcia wejściowego 11,8, 26, 90 V Opcjonalny
Efektywna wartość referencyjnego napięcia wejściowego 11,8, 26, 115 V Opcjonalny
Impedancja wejściowa sygnału Sygnał 90V Pojedynczy koniec 100 kΩ
Mechanizm różnicowy 200 kΩ
Sygnał 26V Pojedynczy koniec 28 kΩ
Mechanizm różnicowy 56 kΩ
Sygnał 11.8 V Pojedynczy koniec 13 kΩ
Mechanizm różnicowy 26 kΩ
Referencyjna impedancja wejściowa Odniesienie 115 V Pojedynczy koniec 127 kΩ
Mechanizm różnicowy 254 kΩ
Odniesienie 26 V Pojedynczy koniec 28 kΩ
Mechanizm różnicowy 56 kΩ
Odniesienie 11.8 V Pojedynczy koniec 13 kΩ
Mechanizm różnicowy 26 kΩ
Odpowiedź kroku 50Hz 1500max
ms
400Hz 125maks.
2,6kHz 75maks.
Napięcie zasilania +VS +15V 18
mA
-VS +15V 18
VL +5V 2
Zajęty Szerokość impulsu 200~600 ns
Sygnał Ładowność 3maks. TTL
Wyjście cyfrowe VOH 2,4 min V
TOM 0,4 maks. V
Ładowność 3maks. TTL
Gdzie θ jest symulowanym kątem wejściowym.
Sygnał ortogonalny jest mnożony przez binarny kąt cyfrowy φ w wewnętrznym liczniku odwracalnym w mnożniku funkcji sinus-cosinus i otrzymuje się funkcję błędu:
WT0sinθ cosφ sinωt-W0cosθ sinφ sinωtu003dW0sin(θ-φ) sinωt
Sygnały są wysyłane do oscylatora sterowanego napięciem po wzmocnieniu, dyskryminacji fazy i filtracji całkowej, jeśli θ-φ≠0, oscylator sterowany napięciem wyśle impuls, aby zmienić dane w liczniku odwracalnym, aż θ-φ osiągnie zero z dokładnością do konwerter, podczas tego procesu, konwerter cały czas śledzi zmianę kąta wejściowego θ. Zasady działania przedstawiono na rys. 2.
Funkcja transferu: poniżej przedstawiono parametry funkcji transferu HSDC2112 i HSDC2114 (400Hz), w przypadku innych modeli prosimy o bezpośredni kontakt z producentem.
Rys.2 Schemat blokowy zasady działania przekształtnika
HSDC2112 (400Hz)
θout(S)/θwe(S)u003d
HSDC2114 (400Hz)
θout(S)/θwe(S)u003d
(1) Transfer danych
Istnieją dwie metody odczytywania poprawnych danych konwertera:
tryb (odczyt synchroniczny):
Ustaw na logiczne „0”, w tym momencie konwerter przestanie śledzić. Odczekaj 1 µs, dane wyjściowe się ustabilizują. Odczytaj dane, w tym momencie odczytane dane są aktualnymi danymi w tym momencie (opóźnione o 1 µs). Ustaw logikę „1”, w tym momencie konwerter ponownie rozpocznie śledzenie, aby przygotować się do odczytu następnych poprawnych danych.
Tryb zajętości (odczyt asynchroniczny):
W przypadku trybu odczytu asynchronicznego, logiczne „1” lub puste, wewnętrzna pętla konwertera jest zawsze w stanie śledzenia. To, czy pętla wewnętrzna jest w stanie stabilnym, czy dane wyjściowe są prawidłowe, należy określić na podstawie stanu sygnału zajętości, gdy sygnał zajętości jest na wysokim poziomie, oznacza to, że dane są w trakcie konwersji, a dane w tym czasie są niestabilne nieprawidłowe dane; gdy sygnał zajętości jest na niskim poziomie, dane w tym czasie są stabilnymi prawidłowymi danymi i można je odczytać. W trybie odczytu asynchronicznego wyjście zajętości to ciąg impulsów o poziomie TTL, szerokość między nimi jest związana z prędkością obrotową, patrz wykres sekwencji czasowej 3 w celu przesyłania danych.
Rys.3 Wykres sekwencji czasowej przesyłania danych
(2) Tryb tłumienia sygnału wejściowego
Jeżeli zastosowany przez użytkownika synchronizator lub przelicznik jest niestandardowy, w celu dopasowania napięcia sygnału wejściowego i wejściowego napięcia wzbudzenia do wartości nominalnych przetwornika, użytkownik może zastosować metodę zewnętrznego tłumienia połączonego szeregowo, tj. dla każdego 1V powyżej wartości nominalnej, podłączyć szeregowo rezystancję 1,1kΩ na odpowiednim końcu wejściowym. W przypadku stosowania konwertera należy precyzyjnie dobrać i dobrać rezystancję szeregową na każdym zacisku oraz dobrać materiał rezystancyjny z tej samej partii, aby zapewnić dokładność konwersji konwertera w szerokim zakresie temperatur, na każde 0,1% dopasowania błąd rezystancji szeregowej wygeneruje błąd konwersji minuty kątowej 1,7.
Producent zaleca, aby powiadomić producenta o dostosowaniu niestandardowego synchronizacji lub przelicznika zgodnie z wymaganymi parametrami, gdy użytkownik ich używa.
6. Krzywa MTBF (rys. 4)
Rys. 4 Krzywa MTBF-temperatura
(Uwaga: zgodnie z GJB/Z299B-98, przewidywany dobry stan podłoża) 7. Oznaczenie pinów (rys. 5, tabela 4)
Uwaga: (powyższa struktura jest odpowiednia dla HRDC2114)
② Dla SDC brak pinu S4.
③ Dla urządzenia 12-bitowego brak pinów 13 i 14, dla urządzeń 10-bitowych brak pinów 11, 12, 13 i 14.
Rys. 5 Kołki (widok z góry)
Tabela 4 Oznaczenia pinów
Szpilka Symbol Funkcjonować Szpilka Symbol Funkcjonować
1 D1 Wyjście cyfrowe bit 1 (MSB) 15 Vel Wyjście napięciowe prędkości kątowej
2 D2 Wyjście cyfrowe bit 2 16 S4 Wejście sygnału
3 D3 Wyjście cyfrowe bit 3 17 S3 Wejście sygnału
4 D4 Wyjście cyfrowe bit 4 18 S2 Wejście sygnału
5 D5 Wyjście cyfrowe bit 5 19 S1 Wejście sygnału
6 D6 Wyjście cyfrowe bit 6 20 Zajęty Wyjście sygnału zajętości
7 D7 Wyjście cyfrowe bit 7 21 Zablokuj wejście sygnału
8 D8 Wyjście cyfrowe bit 8 22 +15V +15V moc
9 D9 Wyjście cyfrowe bit 9 23 GND GND
10 D10 Wyjście cyfrowe bit 10 (10-bit LSB) 24 -15V -15V moc
11 D11 Wyjście cyfrowe bit 11 25 +5V +5V moc
12 D12 Wyjście cyfrowe bit 12 (10-bit LSB) 26 RLo Dolny koniec wejścia sygnału odniesienia
13 D13 Wyjście cyfrowe bit 13 27 RHi Dolny koniec wejścia sygnału odniesienia
14 D14 Wyjście cyfrowe bit 14 (10-bit LSB)
Uwagi: ① Zasilanie: +15V, +5V, GND.
② Binarne wyjście cyfrowe: odpowiednio 10 bitów, 12 bitów i 14 bitów.
③ RHi, RLo: wejście sygnału wzbudzenia.
④ S1, S2, S3 i S4: wejście sygnału synchronizacji lub przelicznika (S4 nie jest używane do synchronizacji)
⑤ Vel: sygnał prędkości. Jest to sygnał napięciowy, którego wartość jest proporcjonalna do prędkości kątowej wału.
⑥ Zajęty: sygnał zajęty. Wskazuje, czy dane konwertera są w stanie aktualizacji. Gdy zajęty jest na wysokim poziomie, oznacza to, że konwerter przeprowadza konwersję danych, dane wyjściowe w tym czasie są nieprawidłowe; gdy Busy jest na niskim poziomie, dane w konwerterze są stabilne i dane wyjściowe w tym czasie są prawidłowe.
⑦ : To jest zewnętrzny sygnał wstrzymania. Za pomocą tego sygnału można kontrolować stan śledzenia wewnętrznego, gdy jest to logiczne „1”, konwerter znajduje się w normalnym stanie śledzenia wewnątrz, w tym czasie sygnał zajętości wskazuje, czy dane wyjściowe są prawidłowe, czy nie, gdy jest to logiczne „0 ”, konwerter przestaje tymczasowo śledzić stan, dane wyjściowe pozostają stabilne i są prawidłowymi danymi wyjściowymi. Gdy wartość logiczna wynosi „1”, konwerter ponownie rozpocznie śledzenie (maksymalny czas przywracania jest w przybliżeniu równy maksymalnemu czasowi odpowiedzi kroku). Ta szpilka została wciągnięta do środka.
8. Tabela wartości mas (Tabela 5)
Tabela 5 Tabela wartości mas
Fragment Kąt Fragment Kąt Fragment Kąt
1(MSB) 180,0000 6 5.6250 11 0,1758
2 90,0000 7 2,8125 12 (dla 12-bitowego LSB) 0,0879
3 45.0000 8 1.4063 13 0,0439
4 22.5000 9 0,7031 14 (dla 14-bitowego LSB) 0,0220
5 11.2500 10 (dla 10-bitowego LSB) 0,3516
9. Schemat połączeń dla typowego zastosowania (rys. 6)
(1) Podłączenie konwertera
±15V, +5V i GND należy podłączyć do odpowiednich pinów na konwerterze, należy zwrócić uwagę, że polaryzacja zasilania musi być prawidłowa, w przeciwnym razie konwerter może ulec uszkodzeniu. Zaleca się podłączenie kondensatorów bocznikujących 0,1 μF i 6,8 μF równolegle między każdym zaciskiem zasilania a masą.
Wejścia sygnałowe muszą odpowiadać fazie wzbudzenia, ich faza jest następująca:
RHi~RLo: VRsinωt
Dla synchronizacji:
Dla S1~S3: sinθ sinωt
Dla S3~S2: sin(θ+120o) sinωt
Dla S2~S1: sin(θ+240o) sinωt
Dla resolwera:
S1~S3为: grzechθ grzechωt
S2~S4为: cosθ sinωt
Rys. 6 Schemat połączeń dla typowego zastosowania
Uwaga: żaden sygnał wejściowy RHi, RLo, S1, S2, S3 i S4 nie może być podłączony do innych pinów w obawie przed uszkodzeniem urządzenia.
(2) Interfejs z komputerem
Aby zapobiec gromadzeniu danych podczas wysokiego poziomu impulsu Busy i zapewnić uzyskanie prawidłowych danych, można przyjąć połączenie na Rys.7:
(3) Zastosowanie konwertera
Oprócz bezpośredniego zastosowania w precyzyjnym pomiarze kąta obrotu synchro lub resolwera, konwerter kąta wału może również stanowić dwubiegowy układ pomiarowy lub inny cyfrowy układ sterowania pomiarem o większej precyzji.
Oprócz bezpośredniego zastosowania w precyzyjnym pomiarze kąta obrotu synchro lub resolwera, konwerter kąta wału może również stanowić dwubiegowy układ pomiarowy lub inny cyfrowy układ sterowania pomiarem o większej precyzji.
Rys. 8 przedstawia przykład układu dwubiegowego złożonego z przekształtnika. System dwóch prędkości ustanowiony na zasadzie kombinacji pomiaru zgrubnego i precyzyjnego ma wyższą precyzję konwersji, rysunek pokazuje system konwersji dwóch prędkości składający się z dwóch synchronizatorów (lub przeliczników) sprzężonych przez skrzynię biegów, dwóch konwerterów SDC i dwóch -szybki procesor HTSL19, jego moc wyjściowa sięga 19 bitów.
Rys.7 Możliwy obwód interfejsu zewnętrznego komputera
Rys.8 Zastosowanie dwubiegowego układu SDC
Rys.9 przedstawia cyfrowy system serwosterowania. Wykorzystuje pętlę ujemnego sprzężenia zwrotnego sterowania cyfrowego utworzonego przez SDC, aby uzyskać precyzyjną kontrolę kąta obrotu.
10. Specyfikacja opakowania (jednostka: mm) (rys. 10)
Rys.9 Cyfrowy system serwosterowania
Rys.10 Widok opakowania z zewnątrz
11. Klucz numeracji części (rys. 11)
Rys.11 Klawisz numeracji części
Uwaga: gdy powyższe napięcie sygnału i napięcie odniesienia (Z) są niestandardowe, należy je podać w następujący sposób:
(np. napięcie odniesienia 5V i napięcie sygnału 3V są wyrażone jako -5/3)
Środki ostrożności dotyczące stosowania
Zasilanie prawidłowo, podczas uruchamiania, dokładnie podłącz dodatnie i ujemne bieguny mocy, aby uniknąć wypalenia.
Podczas montażu spód produktu powinien ściśle przylegać do płytki drukowanej, aby uniknąć uszkodzenia styków, aw razie potrzeby należy dodać zabezpieczenie przed wstrząsami.
Gdy użytkownik składa zamówienie na produkt, szczegółowe wskaźniki wydajności elektrycznej odnoszą się do odpowiedniej normy przedsiębiorstwa.
Konwerter synchronizacji/resolwera na cyfrowy
(Seria HSDC/HRDC27)
1. Cechy (patrz Rys. 1 dla widoku z zewnątrz i Tabela 1 dla modeli)
Rozdzielczość: 12-bit, 14-bit
Wysoka szybkość śledzenia
Integracja hybrydowa, opakowanie z metalową obudową
Wyjście zatrzasku trójstanowego
Z wyjściem Vel sygnału prędkości
Niecałkowicie kompatybilny z serią AD1740
Rozmiar: 45,39 × 29,0 × 7,2 mm2
Waga: 26g
Rys. 1 Widok zewnętrzny serii HSDC/HRDC27 Tabela 1 Modele produktów
12-bitowy 14-bitowy
Synchro Rozpoznawanie Synchro Rozpoznawanie
HSDC2742 -412 HRDC2742 -414 HSDC2754 -612 HRDC2754 -414
HRDC2742 -418 HRDC2754 -418
HRDC2742 -618 HRDC2754 -618
HRDC2754 -666
HRDC2754 -614
2. Zakres zastosowania
System serwo; system antenowy; pomiar kąta; technologia symulacji; kontrola armat; sterowanie obrabiarkami przemysłowymi,
3. Zarys
Seria HSDC/HRDC27 to cyfrowy konwerter synchronizujący/resolwerowy do ciągłego śledzenia pętli serwo typu II, równolegle zatrzaskuje i wysyła 12-bitowe lub 14-bitowe naturalne dane zakodowane binarnie z 32-liniowym metalowym pakietem dual-in-line, wyposażony w zalety małej objętości, lekkości i wysokiej niezawodności itp. są szeroko stosowane w takich systemach automatycznego sterowania, jak system radarowy, system nawigacji itp.
Moc robocza wynosi +15V i +5V DC. Sygnały wejściowe są podzielone na dwa typy: 3-liniowy sygnał synchronizujący i wzbudzający (konwerter SDC) lub 4-liniowy przelicznik i sygnał wzbudzający (konwerter RDC). Wyjście jest binarnym, równoległym kodem cyfrowym. Tabela 2 Warunki znamionowe i zalecane warunki eksploatacji
Maks. bezwzględna wartość oceny Napięcie zasilania Vs: ± 17,25 V
Napięcie logiczne VL: +5,5V
Zakres temperatury przechowywania: -55 ℃ ~ 125 ℃
Zalecane warunki pracy Napięcie zasilania Vs: ±15V
Napięcie zasilania VL: +5V
Efektywna wartość napięcia odniesienia VRef: ±10% wartości nominalnej
Efektywna wartość napięcia sygnału Vi: ±5% wartości nominalnej
Częstotliwość odniesienia f*: 50Hz~2,6kHz
Zakres temperatur pracy TA: -40~+85℃,-55~+105℃
Uwaga: * oznacza, że można go dostosować zgodnie z wymaganiami użytkownika.
4. Parametry techniczne (tabela 2, tabela 3)
Tabela 3 Charakterystyki elektryczne
Charakterystyka HSDC/HRDC2742 Korporacyjna norma wojskowa (Q/HW30859-2006) HSDC/HRDC2754 Korporacyjna norma wojskowa (Q/HW30832-2006) Jednostka Uwagi
Wydajność konwertera Dokładność ±8,5 ±5,3 Minuta kątowa
Prędkość śledzenia 25(min) 12(min) rps Przy wzbudzeniu 400 Hz
Rezolucja 12 14 fragment
Częstotliwość sygnału i odniesienia 50~2600 50~2600 Hz Opcjonalny*
Napięcie wejściowe sygnału 11,8, 26, 90 11,8, 26, 90 V Opcjonalny**
Referencyjne napięcie wejściowe 11,8, 26, 115 11,8, 26, 115 V Opcjonalny**
Odpowiedź kroku 100 150 ms
Stała przyspieszenia 82000 39000 s-2
Pobór energii 0,86 maks. 1,3maks W
Szerokość impulsu zajętego 1maks. 1maks. µs
Obciążalność wyjścia cyfrowego 2maks. 2maks. TTL
Uwagi: * Dla konwertera o innej częstotliwości pracy np. 50Hz, 2kHz itp. jego parametry dynamiczne są inne, które można podać w zależności od potrzeb użytkownika;
** wskazuje, że można go dostosować zgodnie z wymaganiami użytkownika.
5. Zasada działania (rys. 2)
Synchroniczny sygnał wejściowy (lub sygnał wejściowy przelicznika) jest konwertowany na sygnał ortogonalny poprzez wewnętrzną izolację różnicową:
V1u003dKE0sinθ sinωt,V2u003dKE0cosθ sinωt
Gdzie θ jest symulowanym kątem wejściowym.
Te dwa sygnały i kąt cyfrowy φ wewnętrznego licznika odwracalnego są mnożone w mnożniku funkcji sinus i cosinus i są traktowane z błędem:
WT0sinθ cosφ sinωt-W0cosθ sinφ sinωtu003dW0sin(θ-φ) sinωt
Sygnały są wysyłane do oscylatora sterowanego napięciem po wzmocnieniu, dyskryminacji fazy, filtracji całkowej, jeśli θ-φ≠0, oscylator sterowany napięciem zmienia dane w liczniku odwracalnym z impulsami wyjściowymi, aż θ-φ osiągnie zero z dokładnością konwerter, podczas tego procesu konwerter cały czas śledzi zmianę kąta wejściowego θ.
Rys.2 Schemat blokowy zasady działania
Funkcja transferu konwertera
Funkcja zamkniętej pętli
Metoda przesyłania danych i kolejność czasowa
Istnieją dwie metody odczytywania danych efektywnych w konwerterze: odczyt synchroniczny i odczyt asynchroniczny.
(1) Tryb wstrzymania (odczyt synchroniczny):
A: konwerter jest podłączony do 16-bitowej magistrali. Bysel jest połączony z logiką „1”.
jest ustawiony na logiczne „0” z logicznego „1” (blokada danych), odczekaj 1μs; ustawiony na logiczne „0”, zatrzask wewnątrz konwertera umożliwia wyprowadzanie danych; odczyt danych 12-bitowych lub 14-bitowych; ustaw Inhibit na logiczne „1”, aby przygotować się do odczytu następnych poprawnych danych (patrz wykres sekwencji czasowej dla transferu 16-bitowego).
B: konwerter jest podłączony do szyny 8-bitowej, bity D1~D8 są podłączone do szyny danych, a reszta jest pusta.
jest ustawiony na logiczne „0” z logicznego „1” (blokada danych), odczekaj 1μs; ustawione na logiczne „0”, dane zatrzasku wewnątrz konwertera umożliwiają wyjście; jeżeli Byse1 jest ustawione na logiczne „1”, konwerter bezpośrednio odczytuje wyższe dane 8-bitowe, jeśli Byse1 jest ustawione na logiczne „0”, konwerter odczytuje pozostałe bity, automatycznie dodaje zero dla niepełnych bitów; ustawić na logiczne „1”, aby przygotować się do odczytu następnych poprawnych danych (patrz Rys. 3 i Rys. 4 dla 8-bitowej sekwencji czasu transferu).
Rys. 3 Diagram sekwencji czasowej 16-bitowego transferu magistrali
Rys. 4 Diagram sekwencji czasowej transferu magistrali 8-bitowej
(2) Tryb zajęty (odczyt asynchroniczny)
W trybie odczytu asynchronicznego jest ustawione na logiczne „1” lub jest puste, to czy pętla wewnętrzna jest w stanie stabilnym, czy dane wyjściowe są prawidłowe, należy określić na podstawie stanu sygnału zajętości zajętości. Gdy sygnał zajętości jest na wysokim poziomie, oznacza to, że dane są w trakcie konwersji, a dane w tym czasie są niestabilne i nieprawidłowe; gdy sygnał zajętości jest na niskim poziomie, oznacza to, że konwersja danych została zakończona, dane w tym czasie są stabilne i ważne i można je odczytać. Gdy podczas odczytu wystąpi wysoki poziom w trybie zajęty, odczyt tego czasu jest nieprawidłowy. W trybie odczytu asynchronicznego wyjście Busy to ciąg impulsów o poziomie TTL, szerokość między nimi jest związana z prędkością obrotową. Podobnie, istnieją również dwie metody wykorzystania szyny 8-bitowej i szyny 16-bitowej, w przypadku prawidłowego wyjścia danych odczyt danych jest również kontrolowany przez , patrz diagram sekwencji czasowej dla przesyłania danych (rys. 5 i ryc. 6)
Ryc.5 Diagram sekwencji czasowej dla 16-bitowego transferu magistrali
Rys. 6 Diagram sekwencji czasowej dla 8-bitowego transferu magistrali
6. Krzywa MTBF (rys. 7)
Rys. 7 Krzywa MTBF-temperatura 7. Oznaczenie pinów (rys. 8, tabela 3)
Rys. 8 Kołki (widok od dołu)
(Uwaga: zgodnie z GJB/Z299B-98, przewidywany dobry stan podłoża)
Tabela 3 Oznaczenia pinów
Szpilka Symbol Funkcjonować Szpilka Symbol Funkcjonować
1~14 D1~D14 Wyjście cyfrowe 24 Bysel Wybierz bit
15 RLo Wejście sygnału wzbudzenia 25 NC Pozostaw niepodłączony
16 RHi Wejście sygnału wzbudzenia 26 Bramkowanie danych
17 S4 Wejście sygnału 27 Zajęty Zajęte wyjście impulsowe
18 S3 Wejście sygnału 28 Kontrola zatrzasku danych
19 S2 Wejście sygnału 29 +15V Moc
20 S1 Wejście sygnału 30 GND Uziemienie zasilania
21 NC Pozostaw niepodłączony 31 -15V Moc
22 Vel Wyjście napięciowe prędkości 32 +5V Moc
23 Sprawa Sprawa uziemienia
Uwagi: ① W przypadku konwertera 12-bitowego styki 13 i 14 pozostaw niepodłączone.
② W przypadku konwertera SDC pozostaw pin 17 niepodłączony.
③ Zasilanie: ±15V, +5V, GND, zasilanie nie powinno być podłączone odwrotnie, w przeciwnym razie urządzenia ulegną uszkodzeniu.
④ Binarne wyjście cyfrowe: podzielone na 12-bitowe i 14-bitowe.
⑤ RHi, RLo: wejście sygnału wzbudzenia.
⑥ S1, S2, S3, S4: wejście sygnału synchronizacji/resolwera (S4 pozostaje niepodłączony dla synchronizacji).
⑦ Zajęty: sygnał zajęty
Ten sygnał wskazuje, czy wyprowadzany z konwertera numer binarny jest prawidłowy, czy nie. Gdy zajęty jest na wysokim poziomie, oznacza to, że konwerter przeprowadza konwersję danych, dane wyjściowe w tym czasie są nieprawidłowe; gdy Busy jest na niskim poziomie, dane w konwerterze są stabilne i dane wyjściowe w tym czasie są prawidłowe.
⑧ Bramkowanie danych
Ten pin jest pinem wejściowym logiki sterującej, jego funkcją jest wysyłanie danych do konwertera w celu realizacji sterowania trójstanowego. Niski poziom jest prawidłowy, dane wyjściowe konwertera zajmują magistralę danych. Gdy jest na wysokim poziomie, wyprowadzenie danych konwertera jest w trzech stanach, urządzenie nie zajmuje magistrali.
⑨ Kontrola blokady danych (sygnał wstrzymania)
Ten pin jest pinem wejściowym logiki sterującej, jego funkcją jest wysyłanie danych na zewnątrz do konwertera w celu realizacji opcjonalnego sterowania zatrzaskowego lub obejściowego.
Na wysokim poziomie dane wyjściowe konwertera są wysyłane bezpośrednio bez zatrzaskiwania; na niskim poziomie dane wyjściowe konwertera są zatrzaskiwane, dane nie są aktualizowane, ale pętla wewnętrzna nie jest przerywana, a śledzenie działa cały czas. ma podłączony rezystor podciągający wewnątrz konwertera (czy urządzenie korzysta z magistrali danych, tzn. kiedy wyprowadza dane zależy od stanu ).
⑩ Byse1: koniec wyboru bitów
Jest to końcówka sterująca specjalnie zaprojektowana do podłączenia konwertera z 8-bitową lub 16-bitową magistralą danych. Gdy konwerter jest podłączony do 16-bitowej magistrali danych, Byse1 jest podciągany wewnętrznie, konwerter może bezpośrednio wyprowadzać dane 12-bitowe lub 14-bitowe; gdy konwerter jest połączony z 8-bitową magistralą danych Byse1 jest na wysokim poziomie konwerter wyprowadza dane o wyższych 8 bitach (D1~D8), gdy Byse1 jest na niskim poziomie konwerter wyprowadza dane pozostałych bitów (kopiowanie dane pozostałych bitów do bitów D1~D8) i automatycznie wypełnia zero dla danych krótkich bitów. Należy zauważyć, że podłączenie D1~D8 jest potrzebne tylko wtedy, gdy konwerter jest podłączony do 8-bitowej magistrali danych, pozostałe piny danych pozostają niepodłączone.
8. Tabela wartości mas (Tabela 4)
Tabela 4 Tabela wartości masy
Fragment Kąt Fragment Kąt Fragment Kąt
1(MSB) 180,0000 6 5.6250 11 0,1758
2 90,0000 7 2,8125 12 (dla 12-bitowego LSB) 0,0879
3 45.0000 8 1.4063 13 0,0439
4 22.5000 9 0,7031 14 (dla 14-bitowego LSB) 0,0220
5 11.2500 10 0,3516
9. Schemat połączeń dla typowego zastosowania (rys. 9)
Oprócz bezpośredniego zastosowania w precyzyjnym pomiarze kąta obrotu synchro lub resolwera, konwerter kąta wału może również stanowić dwubiegowy układ pomiarowy lub inny cyfrowy układ sterowania pomiarem o większej precyzji. Rys. 9 jest przykładem układu dwubiegowego złożonego z przekształtnika. Układ dwóch prędkości zbudowany na zasadzie kombinacji pomiaru zgrubnego i precyzyjnego ma wyższą precyzję konwersji. Rys. 9 przedstawia układ konwersji dwóch prędkości składający się z dwóch synchronizatorów (lub przeliczników) sprzężonych przez skrzynię biegów, dwóch konwerterów SDC i jednego dwubiegowy procesor HTSL19, jego moc wyjściowa sięga 19 bitów.
Rys. 9 Zastosowanie dwubiegowego układu SDC
10. Specyfikacja opakowania (jednostka: mm) (rys. 10)
Rys.10 Specyfikacja opakowania
Tabela 5 Materiały obudowy
Model obudowy nagłówek Poszycie nagłówka Pokrywa Poszycie pokrywy Materiał przypinki Pin poszycia Styl uszczelniania Uwagi
UP4529-32a Kowar (4J29) Au Stop Fe-Ni (4J42) Au Kowar (4J29) Au Dopasowane opakowanie Powłoka kołka 23 to Au
Uwaga: temperatura pinów lutowniczych nie powinna przekroczyć 300℃ w ciągu 10s.
11. Klucz numeracji części (rys. 11)
Rys.11 Klawisz numeracji części
Uwaga: gdy powyższe napięcie sygnału i napięcie odniesienia (Z) są niestandardowe, należy je podać w następujący sposób:
(np. napięcie odniesienia 5V i napięcie sygnału 3V należy wyrazić jako -5/3)
Środki ostrożności dotyczące stosowania
Zasilanie prawidłowo, podczas uruchamiania, dokładnie podłącz dodatnie i ujemne bieguny mocy, aby uniknąć wypalenia.
Podłączenie konwertera
±15V, +5V i GND należy podłączyć do odpowiednich pinów na konwerterze, należy zwrócić uwagę, że polaryzacja zasilania musi być prawidłowa, w przeciwnym razie konwerter może ulec uszkodzeniu. Zaleca się podłączenie pojemności obejścia 0,1 μF i 6,8 μF równolegle między każdym zaciskiem zasilania a masą. Dozwolone jest podłączenie źródła sygnału i wzbudzenia do S1, S2, S3 i S4 oraz końca RHi i RLo z błędem 5%. Podłączanie D1~D8 jest potrzebne tylko wtedy, gdy konwerter jest podłączony do 8-bitowej magistrali danych, pozostałe piny danych pozostają wolne.
Gdy konwerter jest podłączony do 16-bitowej magistrali danych, wszystkie D1~D14 lub (D1~D12) powinny być podłączone.
Sygnał wejściowy powinien być dopasowany do fazy wzbudzenia, aby można je było poprawnie połączyć z przetwornikiem, ich fazy są następujące:
RHi~RLo: VRsinωt
Dla synchronizacji:
Dla S1~S3: sinθ sinωt
Dla S3~S2: sin(θ+120o) sinωt
Dla S2~S1: sin(θ+240o) sinωt
Dla resolwera:
Dla S1~S3: sinθ sinωt
Dla S2~S4: cosθ sinωt
Uwaga: żaden sygnał wejściowy RHi, RLo, S1, S2, S3 i S4 nie może być podłączony do innych pinów w obawie przed uszkodzeniem urządzenia.
Podczas montażu spód produktu powinien ściśle przylegać do płytki drukowanej, aby uniknąć uszkodzenia styków, aw razie potrzeby należy dodać zabezpieczenie przed wstrząsami.
Gdy użytkownik składa zamówienie na produkt, szczegółowe wskaźniki wydajności elektrycznej odnoszą się do odpowiedniej normy przedsiębiorstwa.
Konwerter R/D (H2S80)
1. Cechy (patrz Rys. 1 dla widoku z zewnątrz i Tabela 1 dla modeli)
Opcjonalna rozdzielczość 10, 12, 14 i 16 bitów
Szybkość śledzenia: max. 1040 obr/s
Parametry dynamiczne: zaprojektowane przez użytkownika
Wysoka impedancja wejściowa, trójstanowe wyjście zatrzaskowe
40-przewodowy, szczelny metalowy pakiet DDIP odporny na mgłę solną
Kompatybilny z serią ADC2S80 amerykańskiej firmy AD
Rozmiar: 53×20×5,3mm2
Waga: 18g
Rys. 1 Widok zewnętrzny H2S80 2. Zakres zastosowania
system serwo rakiet; elektroniczny system kontroli lotu; system kontroli radarowej; system nawigacji statku; monitorowanie anteny; system kontroli artylerii; obrabiarki sterowane numerycznie (CNC); system robota.
3. Zarys
Konwerter R/D z ciągłym śledzeniem pętli serwo H2S80 typu II został zaprojektowany i wyprodukowany przez przyjęcie procesu MCM, urządzenie jądra to specjalny układ opracowany niezależnie przez naszą firmę, układ pinów jest kompatybilny z produktem AD2S80 amerykańskiej firmy AD, 10, 12, 14- i 16-bitowe (rozdzielczość opcjonalna) równoległe, naturalne binarne wyjście z zatrzaskiem danych, 40-wierszowa, hermetyczna obudowa metalowa DIL, ma zalety wysokiej dokładności, niskiego zużycia energii, małej objętości, niewielkiej wagi i wysokiej niezawodności itp. szeroko stosowany do elektronicznego sterowania systemem, jak samolot, statek, artyleria, pocisk, radar, czołg itp. Tabela 1 Warunki znamionowe i zalecane warunki eksploatacji
Maks. bezwzględna wartość oceny Logiczne napięcie zasilania VL: 7V
Napięcie zasilania Vs: ± 13,5 V
Napięcie sygnału Vi: 2V±20%
Napięcie odniesienia: VRef: 2V±20%
Częstotliwość pracy f: 50~20000Hz
Temperatura przechowywania Tstg: 65 ~ 150 ℃
Zalecane warunki pracy Logiczne napięcie zasilania VL: 5±0,5V
Napięcie zasilania Vs: ±12±0,75V
Napięcie sygnału Vi: 2V±10%
Napięcie odniesienia: VRef: 2V±10%
Częstotliwość pracy f: 50~20000Hz
Zakres temperatury roboczej (TA): 55~125 ℃
4. Charakterystyki elektryczne (tabela 1, tabela 2)
Tabela 2 Charakterystyki elektryczne
Charakterystyka H2S80 Jednostka Charakterystyka H2S80
Standard wojskowy dla przedsiębiorstw (Q/HW30974-2007) Jednostka
Rezolucja Opcjonalne 10, 12, 14 i 16-bitowe
±21 minut+1LSB(10 bitów) Napięcie sygnału 2V±10% V
±8 minut+1LSB(12 bitów) Napięcie odniesienia 2V±10% V
Dokładność ±4 minuty+1LSB(14 bitów) fragment Poziom wejścia cyfrowego Kompatybilny z TTL
±2 minuty+1LSB (16 bitów)
Prędkość śledzenia 0~1040 (10 bitów) r/s Poziom wyjścia cyfrowego Wysoka logika ≥3,3
Niska logika ≤0,7 V
0~260 (12 bitów)
0~65 (14 bitów)
0~16 (16 bitów) Moc +12, 12, +5 V
Zakres częstotliwości pracy 50~20000 Hz Pobór energii 450 mW
5. Zasada działania (rys. 2 i rys. 3)
Sygnał wejściowy synchronizacji (lub przelicznika) jest przekształcany na sygnał ortogonalny poprzez wewnętrzną izolację różnicową:
Vsin-KE0sin(ωt+α) sinθ (sin)
Vcos-KE0sin(ωt+α) cosθ (cos)
Gdzie θ jest kątem wejścia analogowego.
Te dwa sygnały i kąt cyfrowy φ wewnętrznego licznika odwracalnego są mnożone w mnożniku funkcji sinus i cosinus i są traktowane z błędem:
KE0sin(ωt+α) (sinθ cosφ -cosθ sinφ)
czyli KE0sin(ωt+α) sin(θ-φ)
Jest wysyłany do oscylatora sterowanego napięciem po wzmocnieniu, dyskryminacji fazy i filtracji całkowej, jeśli θ-φ≠0, oscylator sterowany napięciem wygeneruje impulsy, a licznik odwracalny zliczy je, aż θ-φ osiągnie zero z dokładnością do przetwornik. W tym procesie konwerter cały czas śledzi zmianę kąta wejściowego.
Rys.2 Schemat blokowy zasady działania
Tryb czytania:
Dostępne są dwie metody przesyłania danych:
(1) tryb
Po 640 ns niskiego stanu logicznego dane wyjściowe są prawidłowe, a konwerter realizuje transfer danych przez Enable. Po zwolnieniu Inhibit system automatycznie wygeneruje impuls o szerokości równej szerokości impulsu Busy do aktualizacji danych.
(2) tryb biustu:
Na zboczu narastającym impulsu Busy liczy się trójstanowy licznik odwracalny; na zboczu opadającym impulsu Busy generuje wewnętrznie impuls zatrzasku o szerokości równej szerokości impulsu Busy do aktualizacji danych zatrzasku trójstanowego, kolejność przesyłania danych jest pokazana na rys. 3, innymi słowy , po 600ns niskiego poziomu logiki zajętości, stabilny transfer danych jest prawidłowy. W procesie odczytu, po wystąpieniu wysokiego poziomu w stanie Zajęty, odczyt tego czasu jest nieprawidłowy. W trybie odczytu asynchronicznego wyjście Busy to ciąg impulsów o poziomie CMOS, szerokość impulsu jest związana z prędkością obrotową.
Rys. 3 Diagram sekwencji czasowej odczytu z magistrali
6. Krzywa MTBF (rys. 4)
Rys. 4 Krzywa MTBF-temperatura 7. Oznaczenie pinów (rys. 5, tabela 3)
Rys. 5 Kołki (widok od dołu)
(Uwaga: zgodnie z GJB/Z299B-98, przewidywany dobry stan gruntu)
Tabela 3 Oznaczenia pinów
Szpilka Symbol Funkcjonować Szpilka Symbol Funkcjonować Szpilka Symbol Funkcjonować
1 Ref/I Wejście sygnału odniesienia 15 D7 Wyjście cyfrowe 7 29 DG Uziemienie cyfrowe ⑧
2 Demo/I Wejście dyskryminatora 16 D8 Wyjście cyfrowe 8 30 SC1 Wejście wyboru rozdzielczości ①
3 Acer/O Wejście błędu AC 17 D9 Wyjście cyfrowe 9 31 SC2
4 sałata Wejście sygnału cosinus 18 D10 Wyjście cyfrowe 10 32 NC Pozostaw niepodłączony
5 AG Uziemienie analogowe ⑧ 19 D11 Wyjście cyfrowe 11 33 Zajęty Wyjście sygnału zajętości ④
6 SG Masa sygnału ⑧ 20 D12 Wyjście cyfrowe 12 34 Kierunek Wyjście sygnału kierunku zliczania ⑤
7 grzech Wejście sygnału sinusoidalnego 21 D13 Wyjście cyfrowe 13 35 Ripclk Wyjście sygnału zero-bitowego ⑥
8 +VS Zasilanie +12V ⑦ 22 D14 Wyjście cyfrowe 14 36 -VS -12V moc ⑦
9 D1 Wyjście cyfrowe 1 (MSB) 23 D15 Wyjście cyfrowe 15 37 Vco/I Wejście oscylatora sterowane napięciem
10 D2 Wyjście cyfrowe 2 24 D16 Wyjście cyfrowe bit 16 (LSB) 38 Inte/I Wejście integratora
11 D3 Wyjście cyfrowe 3 25 +VL +5V moc ⑦ 39 Inte/O Wyjście integratora
12 D4 Wyjście cyfrowe 4 26 Włącz wejście sygnału ② 40 Demo/O Wyjście dyskryminatora
13① D5 Wyjście cyfrowe 5 27 NC Pozostaw niepodłączony
14① D6 Wyjście cyfrowe 6 28 Wejście sygnału statycznego ③
Uwaga: ① SC1 i SC2 dla wejścia wyboru rozdzielczości zostały wewnętrznie połączone z oporem podciągającym.
Rezolucja SC1 SC2
10 0 0
12 0 1
14 1 0
16 1 1
② włącz wejście sygnału, ten pin jest pinem wejścia logicznego sterowania bramkowaniem danych, jego funkcją jest zewnętrzne sterowanie trójstanowe na danych wyjściowych konwertera. Niski poziom jest prawidłowy, dane wyjściowe konwertera zajmują magistralę danych. Gdy jest na wysokim poziomie, wyprowadzenie danych konwertera pojawia się w stanie wysokiej impedancji, urządzenie nie zajmuje magistrali. Czas opóźnienia włączenia i zwolnienia wynosi 600ns (maks.).
③ wejście sygnału statycznego, ten pin jest pinem wejściowym logiki sterowania zatrzaskiem danych, jego funkcją jest przeprowadzanie sterowania zatrzaskiem lub obejściem wyboru danych wyjściowych konwertera. Na wysokim poziomie dane wyjściowe konwertera są bezpośrednio wyprowadzane bez zatrzaskiwania; przy niskim poziomie dane wyjściowe konwertera są blokowane, dane nie są aktualizowane, ale pętla wewnętrzna nie jest przerywana, a śledzenie działa cały czas, zostało wewnętrznie połączone z oporem na podciąganie. Po 600ns (max) opóźnieniu opadającego zbocza sygnału statycznego dane stają się stabilne (czy urządzenie zajmuje szynę danych, czy nie, tzn. kiedy wyprowadza dane zależy od stanu Enable).
④ Wyjście sygnału „Zajęty”, ten sygnał wskazuje, czy wyjście kodu binarnego konwertera jest prawidłowe, czy nie. Gdy zajęty jest na wysokim poziomie, oznacza to, że konwerter przeprowadza konwersję danych, dane wyjściowe w tym czasie są nieprawidłowe; gdy Busy jest na niskim poziomie, oznacza to, że dane w konwerterze były stabilne i dane wyjściowe w tym czasie są prawidłowe, szerokość impulsu wynosi 400ns.
⑤ Kierunek: wyjście sygnału kierunku zliczania, wysoki poziom wskazuje, że konwerter dodaje zliczenie, a niski poziom wskazuje, że konwerter odlicza liczbę.
RI RIPCLK: Wyjście sygnału zerowego: gdy dane wyjściowe wzrosną od wszystkich „1” do wszystkich „0” lub dane wyjściowe spadną ze wszystkich „0” do wszystkich „1”, wyjście jest impulsem dodatnim, szerokość impulsu wynosi 200 μs .
⑦ Moc: + VS
Zasilanie +12V
12mA
-VS -12 V moc 18mA
+VL +5V moc 10mA
⑧ Uziemienie: Uziemienie analogowe AG i uziemienie cyfrowe DG muszą być zewnętrznie połączone z uziemieniem zasilania.
8. Schemat połączeń dla typowego zastosowania (rys. 6)
Rys. 6 Schemat połączeń dla typowego zastosowania
(1) Ustawienie filtra
15kΩ≤R1u003dR2≤56kΩ
C1u003dC2u003d (jednostka R1: Ω; fRef to częstotliwość sygnału źródła wzbudzenia, jednostka: Hz)
(2) Ustawienie wzmocnienia
R4u003d
EDCu003d160×10-3
u003d40×10-3
u003d10×10-3
u003d2,5×10-3 (10-bitowa rozdzielczość)
(12-bitowa rozdzielczość)
(rozdzielczość 14-bitowa)
(16-bitowa rozdzielczość)
(3) Wejście sygnału odniesienia
R3u003d100kΩ
C3>
(4) Ustawienie max. szybkość śledzenia
T to maks. szybkość śledzenia (jednostka: r/s), ale nie powinna przekraczać 1/16 częstotliwości odniesienia. Aby produkt był w max. szybkość śledzenia i napięcie prędkości kątowej osiągają 8 V, wymagane jest:
R6u003d
pu003d1024
u003d4096
u003d16384
u003d65536 (10-bitowa rozdzielczość)
(12-bitowa rozdzielczość)
(rozdzielczość 14-bitowa)
(16-bitowa rozdzielczość) Tabela 4 Ustawienie szybkości śledzenia
Rezolucja Proporcja częstotliwości odniesienia do częstotliwości pasma fBW
10 2,5: 1
12 4:1
14 6:1
16 7,5: 1
(5) Ustawienie pętli wyboru przepustowości
Wybrany stosunek częstotliwości odniesienia do częstotliwości pasma produktu nie powinien być mniejszy niż określony w tabeli 4.
Na przykład: wybierz 50 Hz dla rozdzielczości 14-bitowej i częstotliwość odniesienia 400 Hz produktu.
C4u003d (jednostka R6: kΩ)
C5u003d5×C4
R5u003d
(6) Ustawienie filtra VCo
C6u003d470pF,R7u003d68Ω
(7) Ustawienie zerowe
W celu wyeliminowania dryftu zerowego produktu można go wyregulować za pomocą potencjometru R9, metoda polega na: zwarciu pinów 4 i 1 produktu, zwarciu pinów 7 i 6 (odpowiednik kąta wejściowego 0o), regulacji potencjometrem R9 aby dane wyjściowe produktu były zerowe.
Dla zasilacza podłączonego do pinu +VS i -VS jego napięcie powinno wynosić ±12V i nie powinno być podłączone odwrotnie. Zasilanie logiki cyfrowej VL jest podłączone do lokalizacji +5V. Pomiędzy zasilaniem a uziemieniem kondensator ceramiczny 0,1 µF i kondensator elektrolityczny 6,8 µF powinny być połączone równolegle.
9. Specyfikacja opakowania (jednostka: mm) (rys. 7, tabela 5 i 6)
Rys. 7 Widok zewnętrzny i wymiary opakowania Tabela 5 Specyfikacja opakowania
Symbol Wartość
Min. Nominalny Maks.
A 5,5
Φb 0,35 0,55
D 53,8
E 20,0
e 2,54
e1 15.24
L 5
Tabela 6 Materiały obudowy
Model obudowy nagłówek Poszycie nagłówka Pokrywa Poszycie pokrywy Materiał przypinki Pin poszycia Styl uszczelniania Uwagi
UP5320- 40 4J42 Powłoka niklowa 4J42 Powłoka chemiczna Ni 4J42 Powłoka Au Dopasowane opakowanie Baza plus trzy solidne szklane koraliki
Uwaga: temperatura pinów lutowniczych nie powinna przekroczyć 300℃ w ciągu 10s.
10. Klucz numeracji części (rys. 8)
Rys. 8 Klawisz numeracji części
Środki ostrożności dotyczące stosowania
Zasilanie prawidłowo, podczas uruchamiania, dokładnie podłącz dodatnie i ujemne bieguny mocy, aby uniknąć wypalenia.
Podczas montażu spód produktu powinien ściśle przylegać do płytki drukowanej, aby uniknąć uszkodzenia styków, aw razie potrzeby należy dodać zabezpieczenie przed wstrząsami.
Nie zginaj wyprowadzeń, aby zapobiec pęknięciu izolatora, co ma wpływ na właściwości uszczelniające.
Gdy użytkownik składa zamówienie na produkt, szczegółowe wskaźniki wydajności elektrycznej odnoszą się do odpowiedniej normy przedsiębiorstwa.
Konwerter synchronizacji/resolwera na cyfrowy
(Seria HSDC/HRDC1459)
1. Cechy (patrz Rys. 1 dla widoku z zewnątrz i Tabela 1 dla modeli)
Konwersja wewnętrznej izolacji różnicowej
Rozdzielczość 16-bitowa
Dokładność: 2 minuty kątowe
Wyjście zatrzasku trójstanowego
Wysoka prędkość ciągłego śledzenia
36-przewodowy, metalowy, szczelny pakiet DDIP odporny na mgłę solną
Pin-To-Pin kompatybilny z modelem SDC14560 firmy DDC
Rozmiar: 48,2 × 20 × 5,3 mm3; waga: 17g
Rys.1 Widok zewnętrzny serii HSDC/HRDC1459
2. Zakres zastosowania
Wojskowy system sterowania serwomechanizmem; monitorowanie anteny; system kontroli radarowej; system nawigacyjny dla okrętów wojennych; system kontroli dział; system przyrządów pokładowych; lotniczy system elektroniczny; skomputeryzowana maszyna sterowana numerycznie (CNC); technologia robotów.
3. Zarys
Seria HSDC/HRDC1459 synchro/resolver na konwerter cyfrowy to hybrydowe zintegrowane urządzenie do konwersji do ciągłego śledzenia zaprojektowane na zasadzie serwomechanizmu modelu II. Produkty z tej serii są projektowane i produkowane w procesie MCM, podstawowe elementy przyjmują specjalny chip opracowany niezależnie przez nasz instytut. Układ pinów jest kompatybilny z produktami serii SDC14560 amerykańskiej firmy DDC, 16-bitowym równoległym wyjściem z naturalnym kodem binarnym, 36-przewodowym, całkowicie uszczelnionym metalowym opakowaniem DIP, ma zalety wysokiej precyzji, małej objętości, niskiego zużycia energii, niewielkiej wagi i wysoka niezawodność itp. i może być szeroko stosowany w ważnej broni strategicznej i taktycznej, takiej jak samoloty, okręty, armaty, pociski, radary, czołgi itp.
4. Parametry elektryczne (tabela 1, tabela 2)
Maks. bezwzględna wartość oceny Logiczne napięcie zasilania VL: +7V
Napięcie zasilania Vs: ± 17,5 V
Napięcie sygnału Vi: wartość znamionowa ±20%
Napięcie odniesienia VRef: wartość znamionowa ±20%
Częstotliwość pracy f: wartość znamionowa ±20%
Temperatura przechowywania Tstg: -65~150℃
Zalecane warunki pracy Logiczne napięcie zasilania VL: 5±0,5V
Napięcie zasilania Vs: ~15 ~ 0,75 V
Napięcie sygnału Vi: wartość znamionowa ±10%
Napięcie odniesienia VRef: wartość znamionowa ±10%
Częstotliwość pracy f*: wartość znamionowa ±10%
Zakres temperatury roboczej (TA): -55~125 ℃
Uwaga: * oznacza, że można go dostosować zgodnie z wymaganiami użytkownika.
Tabela 2 Charakterystyki elektryczne
Charakterystyka Stan : schorzenie
(VSu003d±15V, VLu003d+5V) Seria HSDC14569
Norma wojskowa (Q/HW20725-2006)
Min. Maks.
Rezolucja Binarny równoległy kod cyfrowy 16-bitowy
Dokładność ±10% napięcia sygnału, napięcia odniesienia i zakresu wahań częstotliwości roboczej -2 minuty kątowe +2 minuty kątowe
Zakres częstotliwości odniesienia 50Hz 2600 Hz
Zakres napięcia odniesienia 2V 115V
Referencyjna impedancja wejściowa 4,4kΩ 129,2kΩ
Zakres napięcia sygnału 2V 90V
Impedancja wejściowa sygnału 4,4kΩ 102,2kΩ
Przesunięcie fazowe sygnału/odniesienia -70o +70o
Poziom logiki wejściowej Logiczne „1” ≥3.3V Logiczne „0” ≤0,8 V
Wejście 0 0,8V
Wejście 0 0,8V
Wejście 0 0,8V
Wyjściowy poziom logiczny Logiczne „1” ≥3.3V Logiczne „0” ≤0,8 V
Wyjście cyfrowego kodu kąta Logiczne „1” ≥3.3V Logiczne „0” ≤0,8 V
Konwertowanie wyjścia sygnału zajętości (CB) 200ns 600ns
Wykrywanie błędów Wyjście bitowe Logiczne „0” oznacza błąd
Ładowność 3TTL
Prędkość śledzenia 2,5 obr/s
Stała przyspieszenia 12500
Czas rozliczenia 850ms
Wyjście napięcia prędkości kątowej (Vel) -10V +10V
Aktualny Vsu003d+15V 10mA
Vsu003d-15V 15mA
VLu003d+5V 20mA
5. Krok odpowiedzi
Gdy nastąpi skok w sygnale wejściowym lub początkowe włączenie zasilania, odpowiedź zostanie wstrzymana z powodu ograniczenia maksymalnej szybkości śledzenia. Proces oscylacji wyjściowego kąta cyfrowego pokazano na rys. 2:
Rys.2 Krzywa odpowiedzi skokowej
6. Zasada działania (rys. 3)
Sygnał wejściowy synchronizacji (lub przelicznika) jest przekształcany na sygnał ortogonalny poprzez wewnętrzną izolację różnicową:
Vsinu003dKE0sin(ωt+α) sinθ (sin)
Vcosu003dKE0sin(ωt+α) cosθ (cos)
Gdzie θ jest kątem wejścia analogowego.
Te dwa sygnały i kąt cyfrowy φ wewnętrznego licznika odwracalnego są mnożone w mnożniku funkcji sinus i cosinus i są traktowane z błędem:
WK0sin(ωt+α) (sinθ cosφ -cosθ sinφ)即WK0sin(ωt+α) sin(θ-φ)
Sygnał ten jest przesyłany do oscylatora sterowanego napięciem po wzmocnieniu, dyskryminacji fazy, filtracji integracyjnej. Jeśli θ-φ≠0, oscylator sterowany napięciem będzie wysyłał impulsy, a licznik odwracalny zlicza je do momentu, gdy θ-φu003d0 z dokładnością przekształtnika. W tym procesie konwerter cały czas śledzi zmianę kąta wejściowego.
Tryb czytania:
Dostępne są dwie metody przesyłania danych:
(1) tryb
Po 640 s niskiego stanu logicznego dane wyjściowe są prawidłowe, a konwerter realizuje transfer danych przez i . Po zwolnieniu Inhibit system automatycznie wygeneruje impuls o szerokości równej szerokości impulsu Busy do aktualizacji danych.
(2) tryb biustu:
Na zboczu narastającym impulsu Busy liczy się trójstanowy licznik odwracalny; na zboczu opadającym impulsu Busy generuje wewnętrznie impuls zatrzasku o szerokości równej szerokości impulsu Busy do aktualizacji danych zatrzasku trójstanowego, kolejność przesyłania danych jest pokazana na rys. 4, innymi słowy , po 600ns niskiego poziomu logiki zajętości, stabilny transfer danych jest prawidłowy. W trybie odczytu asynchronicznego wyjście Busy jest ciągiem impulsów poziomu CMOS, szerokości jego wysokiego i niskiego poziomu zależą od częstotliwości roboczej i prędkości obrotowej wybranego urządzenia.
Rys. 3 Schemat blokowy zasady działania
Rys.4 Sekwencja czasowa przesyłania danych
7. Krzywa MTBF (rys. 5)
Rys. 5 Krzywa MTBF-temperatura 8. Oznaczenie pinów (rys. 6, tabela 3)
Rys. 6 Kołki (widok od dołu)
(Uwaga: zgodnie z GJB/Z299B-98, przewidywany dobry stan podłoża)
Tabela 3 Oznaczenia pinów
Szpilka Symbol Oznaczający Szpilka Symbol Oznaczający
1 S1 Wejście resolwera S1 (lub wejście synchroniczne S1) 25 Włącz kontrolę niskich 8-bitowych cyfr
2 S2 Wejście resolwera S2 (lub wejście synchroniczne S2) 26 Włącz kontrolę wysokich 8-bitowych cyfr
3 S3 Wejście resolwera S3 (lub wejście synchroniczne S3) 27 RIPCLK Wyjście sygnału zero-bitowego
4 S4 Wejście resolwera S4 (pozostawić niepodłączone) 28 VL +5V moc
5~18 D1~D14 Wyjście cyfrowe 1 (MSB)-14 29 GND Grunt
19 RHi Wysoki koniec wejścia sygnału odniesienia 30 NC Pusty
20 RLo Dolny koniec wejścia sygnału odniesienia 31 -Vs -15V moc
21 D15 Wyjście cyfrowe 15 32 -15V +15V moc
22 D16 Wyjście cyfrowe 16 (LSB) 33 Wejście sygnału statycznego
23 Vel Wyjście sygnału napięcia prędkości kątowej 34 Wyjście bitowe wykrywania błędów
24 GB Wyjście sygnału zajętości 36-36 NC Pusty
Uwagi: D1~D16 Końcówka wyjścia cyfrowego kodu kąta równoległego systemu binarnego
S1, S2, S3, S4 Wejście sygnału resolwera (lub synchro)
RHi Wysoki koniec wejścia sygnału odniesienia
RLo Dolny koniec wejścia sygnału odniesienia
Wejście sygnału z niższych 8-bitowych cyfr, ten pin jest wejściem logicznym kontroli bramkowania danych, jego funkcją jest zewnętrzne sterowanie trójstanowe na niższych 8-bitowych danych wyjściowych konwertera. Niski poziom jest prawidłowy, niskie 8-bitowe dane wyjściowe konwertera zajmują szynę danych. Gdy jest na wysokim poziomie, niski 8-bitowy pin wyjściowy konwertera pojawia się w stanie wysokiej impedancji, urządzenie nie zajmuje magistrali. Czas opóźnienia włączenia i zwolnienia wynosi 600ns (maks.).
wysoki 8-bitowy cyfrowy sygnał wejściowy, ten pin jest wejściem logicznym kontroli bramkowania danych, jego funkcją jest zewnętrzne sterowanie trójstanowe na wyższych 8-bitowych danych wyjściowych konwertera. Niski poziom jest prawidłowy, wysokie 8-bitowe dane wyjściowe konwertera zajmują szynę danych. Gdy jest na wysokim poziomie, wysoki 8-bitowy pin wyjściowy konwertera pojawia się w stanie wysokiej impedancji, urządzenie nie zajmuje magistrali. Czas opóźnienia włączenia i zwolnienia wynosi 600ns (maks.).
wejście sygnału statycznego, ten pin jest pinem wejściowym logiki sterowania zatrzaskiem danych, jego funkcją jest przeprowadzanie sterowania zatrzaskiem lub obejściem wyboru danych wyjściowych konwertera. Na wysokim poziomie dane wyjściowe konwertera są bezpośrednio wyprowadzane bez zatrzaskiwania; przy niskim poziomie dane wyjściowe konwertera są blokowane, dane nie są aktualizowane, ale pętla wewnętrzna nie jest przerywana, a śledzenie działa cały czas, zostało wewnętrznie połączone z oporem na podciąganie. Po 600ns (maks.) opóźnieniu opadającego zbocza sygnału statycznego dane stają się stabilne (czy urządzenie zajmuje szynę danych, tj. kiedy wysyła dane, zależy od stanu i ).
Wyjście sygnału CB „Zajęty”, ten sygnał wskazuje, czy wyjście kodu binarnego konwertera jest prawidłowe, czy nie. Po zmianie wejścia kątowego do 0,33 minuty kątowej, koniec CB wysyła dodatni impuls o szerokości 400ns (typowo), gdy CB jest na wysokim poziomie oznacza to, że konwerter jest w trakcie konwersji, w tym czasie dane wyjściowe są nieprawidłowe ; po opadającym zboczu opóźnień sygnału CB o 600ns (maks.), dane stają się stabilne, w tym czasie zaktualizowane dane wyjściowe są ważne.
wyjście bitu detekcji błędu, wysoki poziom wskazuje na normalną pracę konwertera, w przypadku przerwania przewodu sygnałowego lub nieprawidłowego śledzenia przez konwerter bit ten zmienia się na niski poziom z wysokiego.
RIPCLK: Wyjście sygnału zerowego R.C: gdy dane wyjściowe wzrosną ze wszystkich „1” do wszystkich „0” lub dane wyjściowe spadną ze wszystkich „0” do wszystkich „1”, wyjście jest impulsem dodatnim, szerokość impulsu wynosi 200 μs .
VL, VS, VS Przychodzący koniec zasilania
GND Końcówka przewodu uziemiającego
Poradnik:
① Napięcie pinów nie może przekraczać 20% wartości znamionowej.
② Napięcie zasilania nie może przekraczać określonego zakresu.
③ Nie podłączaj referencyjnych RHi i RLo do innych pinów.
④ Dla zasilacza podłączonego do pinu +VS i -VS jego napięcie powinno wynosić ±15V i nie powinno być podłączone odwrotnie. Zasilanie logiki cyfrowej VL jest podłączone do +5V. Pomiędzy zasilaniem a uziemieniem kondensator ceramiczny 0,1 µF i kondensator elektrolityczny 6,8 µF powinny być połączone równolegle.
⑤ Sygnały odniesienia są podłączone do RHi i RLo. W przypadku synchronizacji sygnały są podłączone do S1, S2 i S3 zgodnie z następującą konwencją:
sin(ωt+α) sinθ
sin(ωt+α) sin(θ+120o)
sin(ωt+α) sin(θ+240o)
⑥ W przypadku przelicznika sygnały są podłączone do S1, S2, S3 i S4 zgodnie z następującą konwencją:
sin(ωt+α)sinθ
sin(ωt+α) cosθ
Styki CB, , i wszystkie powinny być połączone zgodnie z opisem dla powyższego transferu danych.
9. Tabela wartości mas (Tabela 4)
Tabela 4 Tabela wartości masy
Fragment Kąt/bit Minuta kątowa/bit Fragment Kąt Minuta kątowa/bit Fragment Kąt Minuta kątowa/bit
1(MSB) 180,0000 10800 7 2,8125 168,75 13 0,0439 2,64
2 90,0000 5400 8 1.4063 84,38 14 0,0220 1,32
3 45.0000 2700 9 0,7031 42.19 15 0,0110 0,66
4 22.5000 1350 10 0,3516 21.09 16(LSB) 0,0055 0,33
5 11.2500 675 11 0,1758 10.55
6 5.6250 387,5 12 0,0879 5.27
10. Schemat połączeń dla typowego zastosowania (rys. 7) 11. Specyfikacja opakowania (jednostka: mm) (rys. 8, tabela 5)
Rys. 7 Schemat połączeń dla typowego zastosowania
Rys. 8 Widok zewnętrzny i wymiary opakowania
Tabela 5 Materiały obudowy
Model obudowy nagłówek Poszycie nagłówka Pokrywa Poszycie pokrywy Materiał przypinki Pin poszycia Styl uszczelniania Uwagi
UP4820-36A 4J42 Powłoka niklowa 4J42 Powłoka chemiczna Ni 4J42 Powłoka Au Dopasowane opakowanie Baza plus trzy solidne szklane koraliki
12. Klucz numeracji części (rys. 9)
Rys. 9 Klawisz numeracji części
Uwaga: gdy powyższe napięcie sygnału i napięcie odniesienia (Z) są niestandardowe, należy je podać w następujący sposób:
(np. napięcie odniesienia 5V i napięcie sygnału 3V są wyrażone jako 5/3)
Środki ostrożności dotyczące stosowania
Zasilanie prawidłowo, podczas uruchamiania, dokładnie podłącz dodatnie i ujemne bieguny mocy, aby uniknąć wypalenia.
Podczas montażu spód produktu powinien ściśle przylegać do płytki drukowanej, aby uniknąć uszkodzenia styków, aw razie potrzeby należy dodać zabezpieczenie przed wstrząsami.
Nie zginaj wyprowadzeń, aby zapobiec pęknięciu izolatora, co ma wpływ na właściwości uszczelniające.
Gdy użytkownik składa zamówienie na produkt, szczegółowe wskaźniki wydajności elektrycznej odnoszą się do odpowiedniej normy przedsiębiorstwa.
Konwerter synchronizacji/resolwera na cyfrowy
(seria MSDC/MRDC37)
1. Cechy (patrz Rys. 1 dla widoku z zewnątrz i Tabela 1 dla modeli)
Wysoka celność
Mała objętość
Wysoka prędkość śledzenia
Nieprzerwane śledzenie podczas przesyłania danych
Wyjście zatrzasku trójstanowego
Niski pobór mocy
Rozmiar: 50,8 × 50,8 × 10 mm2
Waga: 48g
Rys. 1 Widok zewnętrzny serii MSDC/MDRC37 2. Zakres zastosowania
mechanizm serwo; monitorowanie anteny; system nawigacyjny; kontrola artylerii; kontrola przemysłowa; system robota; radarowy system kontroli.
3. Zarys
Seria MSDC/MRDC37 to 16-bitowy cyfrowy konwerter na synchronizator/resolwer. Sygnał wejściowy jest podzielony na czteroprzewodowy sygnał przelicznika i wzbudzenia lub trójprzewodowy sygnał synchronizujący i wzbudzający. Sygnał wyjściowy to równoległy naturalny kod binarny, buforowany przez trzystanowy zatrzask i zgodny z poziomem TTL.
Produkt wykorzystuje obwód serwo drugiego rzędu o małej objętości i wadze, a użytkownik może z niego bardzo wygodnie korzystać, kontrolując piny sygnałowe.
4. Parametry techniczne (tabela 1, tabela 2)
Tabela 1 Warunki znamionowe i zalecane warunki eksploatacji
Maks. bezwzględna wartość oceny Napięcie zasilania +VS: 12,5~17,5V
Napięcie zasilania Vs: 17,25~12,5V
Logiczne napięcie zasilania VL: 7V
Zakres temperatury przechowywania: -40 ~ + 100 ℃
Zalecane warunki pracy Napięcie zasilania +VS: 15V±5%
Napięcie zasilania Vs: 15V±5%
Napięcie logiczne VL: 5V±5%
Napięcie odniesienia (wartość skuteczna) VRef: wartość nominalna ±10%
Napięcie sygnału (wartość skuteczna) Vi: ±10% wartości nominalnej
Częstotliwość odniesienia f*: wartość nominalna ±10%
Zakres temperatur pracy TA: 40 ℃ ~ 85 ℃
Uwaga: * oznacza, że można go dostosować zgodnie z wymaganiami użytkownika.
Tabela 2 Charakterystyki elektryczne
Charakterystyka Stan : schorzenie
(40~+85℃)
(O ile nie podano inaczej) (seria MSDC/MDRC37)
Jednostka
Min. Maks.
Rozdzielczość/OZE 0~360º 12 16 fragment
Wskaźnik śledzenia/St① 3 36 r/s
Wysoki poziom wyjściowy/VOH TA u003d 25 ℃ 2,4 V
Niski poziom wyjściowy/VOL TA u003d 25 ℃ 0,8 V
Pobór mocy/PD TA u003d 25 ℃ 1,3 W
Liniowość Vel/ERI TA u003d 25 ℃ 1,0 %
Zakres napięcia odniesienia 2 115 V
Zakres napięcia sygnału 2 90 V
Zakres częstotliwości 30 2600 Hz
Dokładność ±3 ±8,5 Minuta kątowa
Uwaga: ① szybkość śledzenia wynosi 3 obr./s dla rozdzielczości 16-bitowej i 36 obr./s dla rozdzielczości 12-bitowej; St można zaprojektować zgodnie z wymaganiami użytkownika.
5. Zasada działania (rys. 2)
Synchroniczny sygnał wejściowy (lub sygnał wejściowy przelicznika) jest konwertowany na sygnał ortogonalny poprzez wewnętrzną izolację różnicową:
V1u003dKE0sinθ sinωt,V2u003dKE0cosθ sinωt
Rys.2 Schemat blokowy zasady działania
Gdzie θ jest kątem wejścia analogowego.
Te dwa sygnały i kąt cyfrowy φ wewnętrznego licznika odwracalnego są mnożone w mnożniku funkcji sinus i cosinus i są traktowane z błędem:
K·E0sinθ cosφ sinωt-WE0cosθ sinφ sinωtu003dWe0sin(θ-φ) sinωt
Sygnały są wysyłane do oscylatora sterowanego napięciem po wzmocnieniu, dyskryminacji fazy, całkowaniu i filtracji, jeśli θ-φ≠0, oscylator sterowany napięciem zmienia dane w liczniku odwracalnym z impulsami wyjściowymi, aż θ-φ osiągnie zero z dokładnością do konwerter, podczas tego procesu, konwerter cały czas śledzi zmianę kąta wejściowego θ.
Transfer funkcji konwertera pokazano na rys. 3.
Rys. 3 Przekazywanie funkcji konwertera
闭环函数.
Metoda przesyłania danych i kolejność czasowa
Istnieją dwie metody odczytywania danych efektywnych w konwerterze: odczyt synchroniczny i odczyt asynchroniczny.
(1) Tryb wstrzymania (odczyt synchroniczny):
A: konwerter jest podłączony do 16-bitowej magistrali. B


 X
X




















 Gold Supplier
Gold Supplier